
El circuito
La interfaz de un display LCD estándar de caracteres es una interfaz paralelo de 8 bits, con 3 líneas de control adicionales (RS, EN y RW). Del bus paralelo de 8 bits pueden usarse sólo los 4 bits más significativos enviando de forma adecuada los comandos. Los circuitos de conversión a I2C que se venden habitualmente por AliExpress, Ebay y demás están basados en el conversor I2C/paralelo de 8 bits PCF8574 de Texas Instruments: del bus paralelo de dicho conversor se sacan los 4 bits más significativos para el bus paralelo del LCD y las tres señales de control para RS, EN y RW.
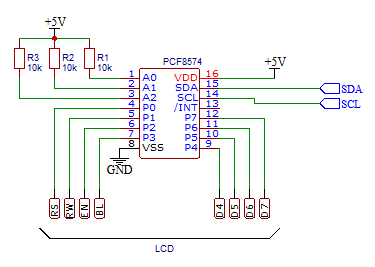
La configuración habitual en este tipo de módulos es esta:
| PCF8574 | bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
| LCD | D7 | D6 | D5 | D4 | BL | EN | RW | RS |
En la tabla se puede apreciar una cuarta señal de control etiquetada como BL (backlight) que controla el encendido del led de la luz trasera. Dicho led no forma parte de la circuitería estándar del display y ha sido introducido en versiones más recientes.
El problema
Los displays baratos de caracteres LCD que se encuentran en el mercado están basados en en un chip de Hitachi que no se caracteriza precisamente por su velocidad (probablemente debe ser uno de los chips más rentabilizados de toda la historia de Hitachi) y normalmente cada acceso debe estar seguido por una espera de uno a varios microsegundos, dependiendo del acceso realizado. A continuación puede verse la tabla de comandos de referencia del display, nótese la columna de la derecha ("Execution Time"):
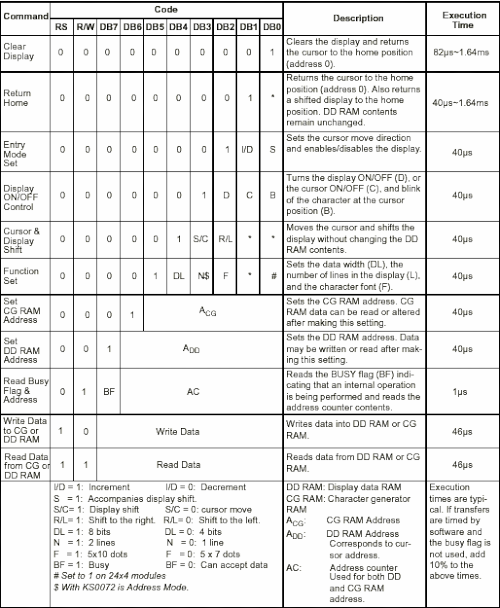
(imagen extraida de https://learningmsp430.wordpress.com/2013/11/13/16x2-lcd-interfacing-in-8bit-mode/)
Cuando uno realiza una búsqueda en internet sobre códigos de ejemplo para control de displays LCD, la gran mayoría de los mismos (no digo todos porque considero que no los he visto todos, pero al menos todos los que yo he visto), implementan las esperas mediante retardos utilizando funciones "delay" o similares. Esta forma de implementación, aunque resulta simple, supone un desperdicio de ciclos e impide que el microcontrolador realice otras tareas de forma concurrente.
La solución no bloqueante
La solución ideal pasaría por una implementación basada en colas y en interrupciones. En este caso se ha implementado una máquina de estados que controla el flujo de datos I2C, el troceado de los bytes en dos nibbles y las esperas que hay que realizar entre un envío y el siguiente. Grosso modo, la solución sería la siguiente:
- Cada vez que se quiere escribir en el display, lo que se hace es escribir lo que se quiere mandar al display en una cola de datos, por lo que la función encargada de escribir regresa inmediatamente (no es bloqueante).
- El systick del microcontrolador cuando detecta que hay algún dato en la cola de datos inicia una máquina de estados que se encarga de trocear en byte en dos nibbles y enviarlos en tiempos diferentes, así hasta que la cola de datos quede vacía, en cuyo momento la máquina de estados pasa a modo "IDLE" y queda a la espera que de haya más datos en la cola.
- La capa I2C también está implementada como una cola de bytes de tal manera que si la capa LCD quiere escribir N bytes seguidos por I2C, los escribe de forma no bloqueante en la cola I2C (la función de escritura I2C también regresa inmediatamente) y se va vaciando a medida que la interrupción de callback de transmisión es llamada por el microcontrolador.
A continuación puede verse cómo ha quedado la máquina de estados del controlador LCD:
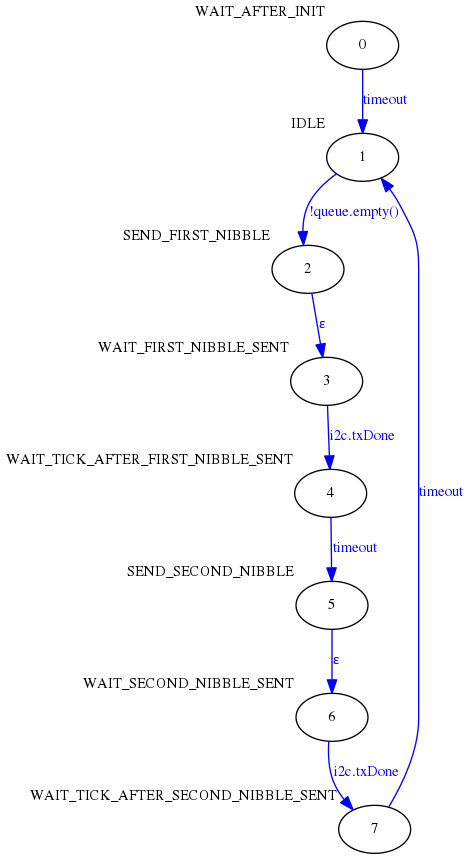
El código no queda tan sencillo a simple vista pero se trata, sin duda, de una implementación más eficiente.
#include "LCD.H" using namespace avelino; using namespace std; void LCD::init(uint8_t address) { this->address = address; this->timerCounter = 5; this->status = LCD::Status::WAIT_AFTER_INIT; this->queue.push(LCD::QueueItem(0x33, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x32, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x28, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x08, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x01, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x06, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x0C, LCD::IsCommand::YES)); } void LCD::tick() { Status localStatus = this->status; do { this->status = localStatus; if (localStatus == LCD::Status::WAIT_AFTER_INIT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::IDLE; } else if (localStatus == LCD::Status::IDLE) { if (!this->queue.empty()) { I2CManager::deviceAddress = this->address << 1; localStatus = LCD::Status::SEND_FIRST_NIBBLE; } } else if (localStatus == LCD::Status::SEND_FIRST_NIBBLE) { uint8_t byte = this->queue.head().byte; LCD::IsCommand isCommand = this->queue.head().isCommand; I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_1 | LCD::BL_1); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_0 | LCD::BL_1); I2CManager::send(); localStatus = LCD::Status::WAIT_FIRST_NIBBLE_SENT; } else if (localStatus == LCD::Status::WAIT_FIRST_NIBBLE_SENT) { if (I2CManager::txDone) { this->timerCounter = 1; localStatus = LCD::Status::WAIT_TICK_AFTER_FIRST_NIBBLE_SENT; } } else if (localStatus == LCD::Status::WAIT_TICK_AFTER_FIRST_NIBBLE_SENT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::SEND_SECOND_NIBBLE; } else if (localStatus == LCD::Status::SEND_SECOND_NIBBLE) { uint8_t byte = this->queue.head().byte << 4; LCD::IsCommand isCommand = this->queue.head().isCommand; this->queue.pop(); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_1 | LCD::BL_1); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_0 | LCD::BL_1); I2CManager::send(); localStatus = LCD::Status::WAIT_SECOND_NIBBLE_SENT; } else if (localStatus == LCD::Status::WAIT_SECOND_NIBBLE_SENT) { if (I2CManager::txDone) { this->timerCounter = 1; localStatus = LCD::Status::WAIT_TICK_AFTER_SECOND_NIBBLE_SENT; } } else if (localStatus == LCD::Status::WAIT_TICK_AFTER_SECOND_NIBBLE_SENT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::IDLE; } } while (localStatus != this->status); } void LCD::write(const char *s, int16_t size, LCD::IsCommand isCommand) { while ((*s != 0) && ((size < 0) || (size > 0))) { this->queue.push(QueueItem(*s, isCommand)); s++; if (size > 0) size--; } }
La función miembro "tick" es invocada desde la interrupción systick del microcontrolador en "main.cc":
LCD lcd; void systick() __attribute__ ((section(".systick"))); void systick() { lcd.tick(); }
Nótese que las colas (tanto la cola I2C como la cola LCD) están implementadas usando colas circulares estáticas a través de una plantilla ("StaticQueue.H").
#ifndef __STATICQUEUE_H__ #define __STATICQUEUE_H__ #include <stdint.h> extern "C++" { namespace avelino { using namespace std; template <typename T, int32_t N> class StaticQueue { public: T data[N]; int32_t headIndex; int32_t tailIndex; void push(const T &v); const T &head() { return this->data[this->headIndex]; }; void pop(); bool empty() { return (this->headIndex == this->tailIndex); }; StaticQueue() : headIndex(0), tailIndex(0) { }; }; template <typename T, int32_t N> void StaticQueue<T, N>::push(const T &v) { this->data[this->tailIndex] = v; this->tailIndex++; if (this->tailIndex == N) this->tailIndex = 0; } template <typename T, int32_t N> void StaticQueue<T, N>::pop() { this->headIndex++; if (this->headIndex == N) this->headIndex = 0; } } } #endif // __STATICQUEUE_H__
Se ha utilizado en varios sitios el "enum class", que permite trabajar con enumerados fuertemente tipados (introducido en el estándar C++11).
En la sección soft puede descargarse todo el código fuente.
[ añadir comentario ] ( 1406 visualizaciones ) | [ 0 trackbacks ] | enlace permanente
Tweet | |

 ( 3 / 10883 )
( 3 / 10883 )Los SoCs están diseñados para ejecutar sistemas operativos completos (Linux, Android, etc.). La programación bare metal de este tipo de chips es una tarea complicada y poco agradecida (normalmente no se justifica el uso de un SoC sin sistema operativo, para eso están los microcontroladores), sin embargo estos proyectos brindan una oportunidad única para conocer los entresijos del chip y de paso entender mejor cómo funcionan los SoCs en general.
Orange Pi Zero Plus
El corazón de la placa Orange Pi Zero Plus (la que se ha utilizado para esta prueba de concepto) es un SoC H5 de la marca AllWinner. Se trata de un ARM Cortex-A53 de cuadruple núcleo que implementa la arquitectura ARMv8-A (64 bits). En el arranque, todos los ARM de 64 bits arrancan en modo 32 bits, así que por simplicidad se ha decidido que la prueba de concepto se haga en el modo de arranque compatible ARMv7-A (32 bits, sin pasar a modo 64 bits) y utilizando sólo el primer núcleo (en el arranque sólo está operativo el núcleo 0, los núcleos 1, 2 y 3 están desactivados).
La secuencia de arranque del H5
El H5 implementa varias formas y modos de arranque, sin embargo, en la placa Orange Pi Zero Plus el modo de arranque que se usa es el que busca en la tarjeta de memoria (MicroSD) el bootloader. En el caso habitual, para cargar un sistema operativo, dicho bootloader sera el U-Boot u otro similar. Aunque en el manual de usuario del H5 se especifica de forma más detallada, se puede simplificar diciendo que al arrancar el H5 ejecuta una "boot ROM" (BROM) que no es modificable y que se encuentra cableada dentro del chip. Esta ROM se encarga de inicializar la tarjeta de memoria, de cargar el SPL (Second Program Loader) desde la tarjeta de memoria en la RAM y de ejecutar dicho código una vez está cargado en RAM. En terminología H5 este SPL hace las veces de boot loader.
En http://linux-sunxi.org/Bootable_SD_card#SD_Card_Layout se especifica la distribución de los datos en la tarjeta de memoria, dónde debe estar alojado el SPL (offset 8192) y lo que puede ocupar como máximo (32 KBytes). Según la documentación oficial (http://linux-sunxi.org/BROM#U-Boot_SPL_limitations), este SPL no puede ser código tal cual, sino que debe tener un formato y una especie de firma digital especial. Dicho formato se encuentra documentado y un programador desarrolló hace tiempo una pequeña utilidad llamada "mksunxiboot", open source, programada en C, que, a partir de un binario estándar, genera un binario firmado y reconocible por parte del SoC como un SPL válido (la firma no deja de ser una estructura de datos en la cabecera más un checksum). El código fuente de dicha utilidad (es un único fichero en C) se puede encontrar en https://github.com/amery/mksunxiboot/.
Haciendo nuestro propio SPL
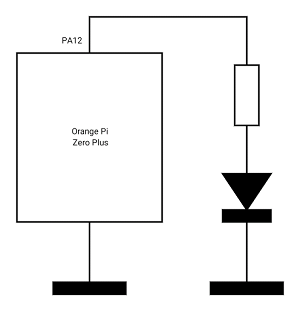
Para hacer la prueba de concepto bare metal bastará con hacer un pequeño programa que haga de SPL. En este caso se ha optado por hacer el típico blinker que actúe sobre una de las salidas GPIO de la placa a la que conectaremos un led para comprobar que el invento funciona. Usaremos la salida GPIO12 (se podría usar cualquier otra) que se corresponde con el pin 3 del puerto de expansión de la Orange Pi Zero Plus (http://linux-sunxi.org/Orange_Pi_Zero_P ... nsion_Port).
A continuación necesitaremos cualquier toolchain "arm-none-eabi" que tengamos a mano, puede ser tanto descargada de algún repositorio como compilada por nosotros mismos (ver post en este mismo blog). Se trata de una toolchain diseñada para hacer programas bare metal para arquitecturas ARM de 32 bits. En principio hay dos formas de hacerlo: la elegante y lenta y la "sucia" y rápida. La forma elegante y lenta obliga a escribir un linker script que nos permita pasar casi cualquier programa que queramos a un SPL, sin embargo la forma sucia y rápida, aunque no da tanta libertad, sí que nos permite hacer la prueba de concepto de forma rápida.
#include <stdint.h> void spl() __attribute__ ((section(".spl"))); void spl() { volatile uint64_t n; const uint64_t WAIT = 20000ULL; const uint32_t CCU_BASE = 0x01C20000; *((volatile uint32_t *) (CCU_BASE + 0x0068)) |= 0x00000020; // PIO clock enable const uint32_t PIO_BASE = 0x01C20800; *((volatile uint32_t *) (PIO_BASE + 0x0004)) = 0x77717777; // PA12 como pin de salida while (true) { *((volatile uint32_t *) (PIO_BASE + 0x0010)) = 0x00001000; // PA12 := 1 for (n = 0; n < WAIT; n++) ; *((volatile uint32_t *) (PIO_BASE + 0x0010)) = 0x00000000; // PA12 := 0 for (n = 0; n < WAIT; n++) ; } }
Como se puede apreciar, escribimos el código en una función a la que podemos ponerle el nombre que queramos y, mediante atributos del compilador, le decimos que debe estar en la sección ".spl" (esta etiqueta es arbitraria, la sección podría llamarse ".pepejuan"). Nótese que no estamos usando variables globales y no estamos referenciando nada que esté fuera de la propia función en sí (todo el código está autocontenido). Esta limitación es importante, pues, como se verá más adelante, sólo usaremos como código SPL lo que esté dentro de la sección ".spl" que se ha definido en tiempo de compilación.
A la hora de escribir el código se recurrió al manual de usuario oficial del H5 (https://linux-sunxi.org/File:Allwinner_H5_Manual_v1.0.pdf): en la sección "CCU" (sub sección "Gating and reset") se explica cómo habilitar el reloj para el módulo PIO (el encargado de controlar los pines GPIO), mientras que en la sección "Port Controller (CPUx-PORT)" se explica como habilitar y usar los pines GPIO. Para compilar y generar el fichero binario que transferiremos a la tarjeta MicroSD haremos lo siguiente:
arm-none-eabi-g++ -mtune=cortex-a7 -fno-exceptions -fno-rtti -nostartfiles -c -o spl.o spl.cc
arm-none-eabi-objcopy -O binary -j .spl spl.o spl.bin
mksunxiboot spl.bin spl_with_signature.bin
Primero se genera el fichero "spl.o", a continuación usando la utilidad objcopy extraemos en forma binaria el código que se encuentra en la sección ".spl" desde dentro de "spl.o" hacia "spl.bin" y, como tercer paso, invocamos la utilidad "mksunxiboot" para generar, a partir de "spl.bin", un "spl_with_signature.bin" que sí puede ser transferido tal cual a la tarjeta MicroSD. Como se puede apreciar, se le dice al compilador que genere código compatible Cortex-A7 (para que genere código siguiendo la arquitectura ARMv7-A). Para los que tengan curiosidad por el código que ha generado el compilador, se puede desensamblar dicho código mediante el siguiente comando:
arm-none-eabi-objdump -D spl.o
A continuación cogemos el fichero "spl_with_signature.bin" que acabamos de generar, lo copiamos tal cual a partir del offset 8192 de la tarjeta de memoria y arrancamos la Orange Pi Zero Plus con dicha tarjeta de memoria insertada:
dd if=spl_with_signature.img of=/dev/sdb bs=1024 seek=8
Et voilà :
Todo el código fuente está disponible en la sección soft.
[ añadir comentario ] ( 1231 visualizaciones ) | [ 0 trackbacks ] | enlace permanente
Tweet | |
 ( 3 / 2557 )
( 3 / 2557 )Existen dos tipos básicos de multitarea: la multitarea colaborativa y la multitarea apropiativa. En un post anterior se abordó la implementación de la multitarea cooperativa de forma extensa por lo que ahora le toca el turno a la multitarea apropiativa: en este modelo el sistema "no se fia" de las tareas y de forma periódica arrebata ("se apropia") el control del procesador a la tarea actualmente en ejecución para ceder el control del mismo a otra tarea. Es el mecanismo utilizado por los RTOS en sistemas embebidos y por los sistemas operativos mas grandes (Linux, Windows, OSX, etc.).
Principios
Un sistema con multitarea apropiativa debe por tanto poseer mecanismos que permitan interrumpir la ejecución de la tarea actualmente en curso y que permitan también reanudar la ejecución de otra tarea que haya sido interrumpida previamente. Este mecanismo debería ser lo más transparente al usuario (a las tareas) posible por lo que normalmente se utilizan las interrupciones. Las interrupciones en la totalidad de los procesadores que las implementan (no conozco ningún procesador que no las tenga) permiten ejecutar código de forma no solicitada por la tarea actualmente en ejecución y a raiz de un evento externo al flujo actual de la tarea.
En el momento que se produce la interrupción (la causa puede ser externa al procesador: entradas de datos, pines de entrada que cambian de estado o interna: división entre cero, instrucción no reconocida, etc.) el procesador almacena en la pila del sistema la dirección de la siguiente instrucción que se va a ejecutar y hace que el contador de programa apunte a la primera instrucción del código de interrupción. Este código de interrupción que se ejecuta a raiz del evento suele denominarse ISR (Interrupt Service Routine).
Normalmente existirán diferentes orígenes de interrupción y diferentes vectores de interrupción. Por ejemplo un procesador podría tener dos orígenes de interrupción (el cambio de estado de un pin de entrada y el desbordamiento de un contador interno) y un solo vector de interrupción por lo que se ejecutará la misma ISR para cualquiera de los dos eventos que se produzca. En estos casos, obviamente, el procesador siempre provee mecanismos para que la ISR sea capaz de discernir cuál ha sido la causa de que ella se esté ejecutando (algún registro de estado, por ejemplo).
Lo normal es tener aproximadamente la misma cantidad de orígenes de interrupción que de vectores de interrupción, de tal forma que podemos definir una ISR para cada origen de interrupción. Nótese que una ISR no es más que un trozo de código. En algunos sistemas las ISR no se diferencian en nada de una función normal (por ejemplo, ARM Cortex-M) que debe terminar como todas las funciones con algún tipo de instrucción "ret", mientras que en otros sistemas se debe utilizar algun tipo de instrucción especial normalmente a la hora de regresar: por ejemplo los microcontroladores AVR deben terminar sus funciones ISR con la instrucción "reti" (RETurn from Interrupt). Sin embargo, salvo estas excepciones, dentro de una ISR se puede poner el código que se quiera: no deja de ser un trozo de código como cualquier otro.
Una ISR sencillita
Consideremos inicialmente una ISR sencillita que vamos a compilar para Arduino Leonardo (microcontrolador ATmega32U4):
#include <avr/interrupt.h> #include <avr/io.h> #include <stdint.h> using namespace std; ISR(TIMER0_OVF_vect) { PORTC ^= 0x80; } int main() { PRR1 |= 0x80; DDRC |= 0x80; TCCR0B |= 0x05; TIMSK0 |= 0x01; sei(); while (true) ; return 0; }
$ /ruta/avr/bin/avr-g++ -std=c++11 -DF_CPU=16000000UL -mmcu=atmega32u4 -Os -g -c -o test.o test.cc
$ /ruta/avr/bin/avr-g++ -std=c++11 -DF_CPU=16000000UL -mmcu=atmega32u4 -Os -c -o test.elf test.o
Como se puede ver, usando el compilador avr-g++ se puede hacer de forma muy sencilla un código con soporte para interrupciones en C++. En este caso tenemos un sencillo blinker de toda la vida: cada vez que el Timer 0 se desborda se cambia el estado del bit de salida y hace cambiar de estado a su vez un led conectado a él. Para comprobar de forma detallada cómo funciona el invento podemos desensamblar el fichero ELF generado por el compilador:
$ /ruta/avr/bin/avr-objdump -D test.elf
En la dirección 0 de la memoria tenemos los diferentes vectores de interrupción. Como se puede apreciar está definido el vector 0 (denominado vector de reset ya que en muchos procesadores, como el AVR, el reset se trata como una interrupción más por lo que el vector de reset indica qué código debe ejecutarse nada más encenderse el procesador) y el vector 23 (que se corresponde en el ATmega32U4 con la interrupción de desbordamiento del Timer 0):
Disassembly of section .text:
00000000 <__vectors>:
0: 0c 94 56 00 jmp 0xac ; 0xac <__ctors_end>
4: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
8: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
10: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
14: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
18: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
1c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
20: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
24: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
28: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
2c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
30: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
34: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
38: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
3c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
40: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
44: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
48: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
4c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
50: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
54: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
58: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
5c: 0c 94 62 00 jmp 0xc4 ; 0xc4 <__vector_23>
60: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
64: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
68: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
6c: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
70: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
74: 0c 94 60 00 jmp 0xc0 ; 0xc0 <__bad_interrupt>
Si nos vamos al código que ha generado el compilador para la ISR correspondiente al vector 23:
000000c4 <__vector_23>:
c4: 1f 92 push r1
c6: 0f 92 push r0
c8: 0f b6 in r0, 0x3f ; 63
ca: 0f 92 push r0
cc: 11 24 eor r1, r1
ce: 8f 93 push r24
d0: 88 b1 in r24, 0x08 ; 8
d2: 80 58 subi r24, 0x80 ; 128
d4: 88 b9 out 0x08, r24 ; 8
d6: 8f 91 pop r24
d8: 0f 90 pop r0
da: 0f be out 0x3f, r0 ; 63
dc: 0f 90 pop r0
de: 1f 90 pop r1
e0: 18 95 reti
Vemos que lo primero que hace la ISR es guardar en la pila (PUSH) los registros R1, R0, SREG y R24 que son registros que utiliza ("ensucia") para hacer la operación:
PORTC ^= 0x80;
Y, tras realizar dicha operación, restaura de nuevo dichos registros en orden inverso desde la pila (POP) antes de regresar (RETI). Esta forma de operar hace que la tarea principal (el bucle infinito que hay en la función "main") no se da cuenta de que es interrumpido de forma periódica ya que la ISR se encarga de salvaguardar y restaurar los registros que utiliza de forma transparente. La función "main" como mucho puede notar que cada cierto tiempo, entre instrucción e instrucción, pasan más ciclos de lo normal :-).
Conmutación entre tareas
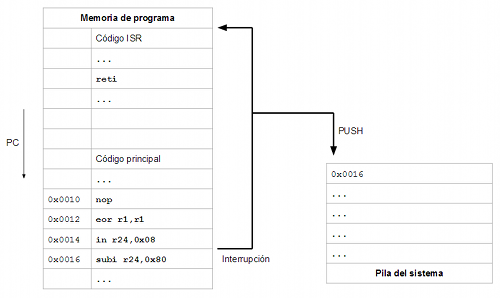
Como se comentó más arriba, cuando se produce una interrupción, los procesadores guardan siempre en la pila la dirección a donde el contador de programa (PC) debe regresar una vez que la interrupción ha terminado de servirse (cuando la ISR termine de ejecutarse). En el caso del ATmega32U4 el procesador empuja en la pila 3 bytes en dos de los cuales almacena la dirección de memoria de la siguiente instrucción que iba a ejecutar (aunque el ATmega32U4 tiene un espacio de direccionamiento de 16 bits, el núcleo AVR que utiliza es el mismo que tienen otros procesadores AVR que tienen un espacio de direcciones de más de 16 bits, de ahí los 3 bytes que se reservan en la pila para la dirección de retorno de la interrupción).
Si lo que queremos es conmutar entre tareas lo que hay que hacer nada más empezar la ejecución de la función ISR es guardar absolutamente todo el estado del procesador y esto se consigue en el caso de AVR apilando los 32 registros generales (desde R0 hasta R31) más el registro de estado SREG en la pila del sistema (PUSH).
ISR(TIMER0_OVF_vect) __attribute__ ((naked)); ISR(TIMER0_OVF_vect) { asm volatile ( "push r0\n" "push r1\n" "push r2\n" "push r3\n" "push r4\n" "push r5\n" "push r6\n" "push r7\n" "push r8\n" "push r9\n" "push r10\n" "push r11\n" "push r12\n" "push r13\n" "push r14\n" "push r15\n" "push r16\n" "push r17\n" "push r18\n" "push r19\n" "push r20\n" "push r21\n" "push r22\n" "push r23\n" "push r24\n" "push r25\n" "push r26\n" "push r27\n" "push r28\n" "push r29\n" "push r30\n" "push r31\n" "in r0, 0x3f\n" "push r0\n"
A continuación, y como el top de la pila es algo cambiante a medida que se va ejecutando código, guardamos en una variable global la dirección de memoria del actual top de la pila: esto nos permitirá acceder cómodamente a los registros que acabamos de guardar independientemente de que empujemos más cosas en ella:
// update stackPointerReference "push r0\n" "in r0, 0x3e\n" "sts stackPointerReference + 1, r0\n" // sph "in r0, 0x3d\n" "sts stackPointerReference, r0\n" // spl "pop r0\n" ); stackPointerReference = (volatile uint8_t *) ((((uint32_t) stackPointerReference) + 1) | 0x800000); // 23-th bit to 1 for SRAM address space
Poner a 1 el bit 23 del puntero stackPointerReference es un artificio necesario en avr-gcc ya que en ese entorno de compilación esa es la forma en la que se diferencian los punteros a memoria de datos de los punteros a memoria de programa (hay que recordar que los AVR tienen arquitectura Harvard).
Tras tener adecuadamente inicializado el puntero "stackPointerReference" podemos proceder a realizar la conmutación de tareas en sí. En nuestro caso se asume una política de tipo Round-robin en la que todas las tareas tienen exactamente el mismo tiempo de proceso. Lo que haremos será, partiendo de una lista de N tareas, cada vez que se ejecute la interrupción de desbordamiento del Timer 0, cambiaremos de la tarea i-ésima a la tarea ((i + 1) MOD N)-ésima, con lo que nos aseguramos que cuando llegamos a la última tarea de la lista volvemos a empezar por la primera y así sucesivamente.
Para cada tarea definimos un objeto de clase Task:
class StackFrame { public: uint8_t sreg; uint8_t r[32]; uint8_t pc[3]; void setPC(void *f) { this->pc[0] = 0; this->pc[1] = ((uint32_t) f) & 0x000000FF; this->pc[2] = ((((uint32_t) f) >> 8) & 0x000000FF); }; } __attribute__ ((packed)); class Task { public: StackFrame stackFrame; bool started; void (*run)(); Task() : started(false) { }; };
Cada tarea tiene una copia del marco de pila ("stack frame") de la última vez que fue interrumpida, un booleano para indicar si la tarea ha sido iniciada o no y un puntero a una función que apunta a la primera instrucción de dicha tarea. En nuestro caso vamos a asumir, sin pérdida de generalidad, que nuestras tareas nunca terminan (no vamos a controlar lo que ocurre cuando la tarea termine).
Definimos además de forma global un array de punteros a objetos de tipo Task, una variable "currentTaskIndex" que indica la actual tarea que está en ejecución y el puntero "stackPointerReference" del que hablamos antes.
const uint16_t MAX_TASKS = 4; volatile uint16_t numTasks; volatile Task tasks[MAX_TASKS]; volatile uint16_t currentTaskIndex; volatile uint8_t *stackPointerReference;
Los primero que hacemos tras calcular el valor de "stackPointerReference" es trabajar con la tarea actual:
Task *currentTask = (Task *) &tasks[currentTaskIndex]; if (currentTask->started) { // copy stack data to currentTask->stackFrame memcpy((void *) ¤tTask->stackFrame, (const void *) (stackPointerReference + 1), sizeof(StackFrame)); } else { // replace return address on currentTask->data with currentTask->run memset((void *) ¤tTask->stackFrame, 0, sizeof(StackFrame)); currentTask->stackFrame.setPC((void *) currentTask->run); }
Si ya está iniciada copiamos los registros que acabamos de apilar (en los PUSH masivos que hicimos al principio de la ISR) al campo "stackFrame" del objeto Task correspondiente a la tarea actual: esto es, ponemos a salvo los registros de la tarea actual pues nos disponemos a hacer una conmutación a la siguiente tarea.
En caso de que la tarea actual no esté iniciada lo que hacemos es borrar el campo "stackFrame" del objeto Task correspondiente a la tarea actual e inicializamos, dentro de esta estructura "stackFrame", los bytes correspondientes al contador de programa para que apunten a la primera instrucción de la tarea actual. Esto hará que cuando se restaure el marco de pila ("stack frame") de esta tarea se inicie dicha tarea (puesto que el contador de programa irá a la primera instrucción de dicha tarea).
A continuación trabajamos con el objeto de tipo Task correspondiente a la tarea siguiente:
uint16_t nextTaskIndex = currentTaskIndex + 1; if (nextTaskIndex == numTasks) nextTaskIndex = 0; Task *nextTask = (Task *) &tasks[nextTaskIndex]; if (nextTask->started) { // replace stack data with nextTask->stackFrame memcpy((void *) (stackPointerReference + 1), (const void *) &nextTask->stackFrame, sizeof(StackFrame)); } else { // replace return address on stack with nextTask->run ((StackFrame *) (stackPointerReference + 1))->setPC((void *) nextTask->run); nextTask->started = true; }
En caso de que la siguiente tarea a iniciar ya esté iniciada ("started") simplemente sobreescribimos todo el marco de pila (los datos que metimos en la pila con los PUSH masivos del principio de la ISR) con los bytes de campo "stackFrame" de la siguiente tarea, lo que provocará una conmutación a la tarea siguiente en el momento que retornemos de la interrupción. En caso de que la siguiente tarea no esté iniciada aún hacemos lo mismo que en caso de la tarea actual: inicializamos, dentro de la estructura "stackFrame" los bytes correspondientes al contador de programa para que apunten a la primera instrucción de la tarea siguiente y, a continuación, marcamos la tarea como iniciada ("started = true").
Antes de terminar actualizamos la variable global "currentTaskIndex" para que apunte a la tarea a la que se le va a entregar el control de la CPU y hacemos una restauración normal de la pila (POP masivos) antes de terminar definitivamente con la instrucción "RETI".
currentTaskIndex = nextTaskIndex; asm volatile ( "pop r0\n" "out 0x3f, r0\n" "pop r31\n" "pop r30\n" "pop r29\n" "pop r28\n" "pop r27\n" "pop r26\n" "pop r25\n" "pop r24\n" "pop r23\n" "pop r22\n" "pop r21\n" "pop r20\n" "pop r19\n" "pop r18\n" "pop r17\n" "pop r16\n" "pop r15\n" "pop r14\n" "pop r13\n" "pop r12\n" "pop r11\n" "pop r10\n" "pop r9\n" "pop r8\n" "pop r7\n" "pop r6\n" "pop r5\n" "pop r4\n" "pop r3\n" "pop r2\n" "pop r1\n" "pop r0\n" "reti\n" ); }
Para la prueba de concepto se implementaros dos tareas muy sencillas: cada una hace parpadear un led a una velocidad diferente:
void task1() __attribute__ ((naked)); void task1() { DDRD |= 0x04; // PD2 (D0 on Arduino Leonardo) as output while (true) { PORTD ^= 0x04; for (volatile uint32_t i = 0; i < 66000; i++) ; } } void task2() __attribute__ ((naked)); void task2() { DDRC |= 0x80; // PC7 (D13 on Arduino Leonardo) as output while (true) { PORTC ^= 0x80; for (volatile uint32_t i = 0; i < 200000; i++) ; } }
Consideraciones adicionales
Nótese que tanto la ISR como las funciones "tarea" ("task1" y "task2") son declaradas con el atributo "naked". Este atributo indica al compilador que no genere código preámbulo ni postámbulo (el código ensamblador relacionado normalmente con el manejo de parámetros y valores de retorno).
En el caso de las funciones "task1" y "task2" se ha usado este atributo por una cuestión de coherencia ya que no se trata de funciones que son invocadas de forma normal desde otra parte del programa y además se trata de funciones que no terminan nunca de ejecutarse.
El caso de la función ISR es más delicado porque en ese caso sí que es necesario usar el atributo "naked". Como se vió en la primera prueba con la interrupción del Timer 0, para el siguiente código:
ISR(TIMER0_OVF_vect) {
PORTC ^= 0x80;
}
El compilador generaba instrucciones PUSH y POP de los registros que utilizaría, antes y después de la operación "PORTC ^= 0x80" respectivamente. En nuestro caso necesitamos que el apilado (PUSH) y desapilado (POP) de registros sea siempre igual y masivo y que esté perfectamente controlado por nosotros por lo que definimos la función con el atributo "naked" y nos encargamos nosotros de escribir de forma explícita el código ensamblador de preámbulo y postámbulo de la ISR.
Todo el código puede descargarse de la sección soft.
[ añadir comentario ] ( 6573 visualizaciones ) | [ 0 trackbacks ] | enlace permanente
Tweet | |
( 3 / 4260 )Hace tiempo publiqué las instrucciones para compilar la toolchain de GNU para ARM "bare metal" (sin sistema operativo, arm-none-eabi) basada en GCC 5.1 y newlib. Dichas instrucciones no son aplicables para las versiones actuales de GCC (7.2 a día de hoy) por lo que a continuación indico las instrucciones actualizadas a las nuevas versiones de binutils, gcc y newlib.
Se trata de una toolchain para sistemas "bare metal", sin sistema operativo, por lo que no tiene soporte para multihilos ni para librerías dinámicas.
binutils 2.29
mkdir -p /opt/baremetalarm/src
mkdir -p /opt/baremetalarm/build
cd /opt/baremetalarm/src
wget https://ftp.gnu.org/gnu/binutils/binutils-2.29.tar.bz2
tar xf binutils-2.29.tar.bz2
chown -R root:root binutils-2.29
cd ../build
mkdir binutils-2.29
cd binutils-2.29/
../../src/binutils-2.29/configure --prefix=/opt/baremetalarm --target=arm-none-eabi --disable-nls --disable-multilib
make
make install
gcc 7.2.0 (stage 1)
cd /opt/baremetalarm/src
wget https://ftp.gnu.org/gnu/gcc/gcc-7.2.0/gcc-7.2.0.tar.gz
wget https://ftp.gnu.org/gnu/gmp/gmp-6.1.2.tar.bz2
wget https://ftp.gnu.org/gnu/mpc/mpc-1.0.3.tar.gz
wget https://ftp.gnu.org/gnu/mpfr/mpfr-3.1.6.tar.gz
tar xf gcc-7.2.0.tar.gz
tar xf gmp-6.1.2.tar.bz2
tar xf mpc-1.0.3.tar.gz
tar xf mpfr-3.1.6.tar.gz
mv gmp-6.1.2 gcc-7.2.0/gmp
mv mpc-1.0.3 gcc-7.2.0/mpc
mv mpfr-3.1.6 gcc-7.2.0/mpfr
chown -R root:root gcc-7.2.0
cd ../build/
mkdir gcc-7.2.0-stage-1
cd gcc-7.2.0-stage-1/
export PATH=/opt/baremetalarm/bin:${PATH}
../../src/gcc-7.2.0/configure --prefix=/opt/baremetalarm --target=arm-none-eabi --enable-languages=c --without-headers --disable-nls --disable-multilib --disable-threads --disable-shared --disable-libssp --with-newlib
make all-gcc all-target-libgcc
make install-gcc install-target-libgcc
newlib
cd /opt/baremetalarm/src
git clone git://sourceware.org/git/newlib-cygwin.git
cd ../build
mkdir newlib
cd newlib
../../src/newlib-cygwin/configure --prefix=/opt/baremetalarm --target=arm-none-eabi --disable-multilib
make
make install
gcc 7.2.0 (stage 2)
cd /opt/baremetalarm/build
mkdir gcc-7.2.0-stage-2
cd gcc-7.2.0-stage-2/
../../src/gcc-7.2.0/configure --prefix=/opt/baremetalarm --target=arm-none-eabi --enable-languages="c,c++" --disable-nls --disable-multilib --disable-threads --disable-shared --disable-libssp --with-newlib
make
make install
El compilador de C++ de GCC 7.2 compila por defecto en modo C++14 y soporta prácticamente todo el estándar C++17.
[ añadir comentario ] ( 1907 visualizaciones ) | [ 0 trackbacks ] | enlace permanente
Tweet | |
( 3 / 3662 )El STM32F103 es un microcontrolador muy asequible que incluye interfaz USB 2.0. La mayoría de desarrollos USB realizados para esta serie de microcontroladores utiliza la librería STM32Cube, desarrollada por el propio fabricante, de libre uso y que abstrae de los entresijos del protocolo al programador. Abordar, sin embargo, el desarrollo de esta funcionalidad desde cero en este o en otros microcontroladores permite profundizar y mejorar en el conocimiento del propio protocolo USB.
Un repaso rápido del protocolo USB
Aunque aquí intentaré desgranar a grandes rasgos el protocolo, recomiendo siempre las dos grandes y mejores fuentes de información sobre el mismo:
USB made simple
USB in a nutshell
Es de lo mejorcito que hay al respecto por la red ya que el documento oficial es un poco infumable. A nivel eléctrico, se trata de un protocolo serie asíncrono que utiliza dos hilos de señal balanceada. El protocolo consiste en una serie de "endpoints" multiplexados en tiempo y enumerados. Hay tres tipos de endpoint:
Control: usado para transferencias de control del dispositivo. Identificación, configuración, etc.
Bulk: usado para transferencias masivas de datos con control de errores (menos ancho de banda).
Interrupt: usado para transferencias pequeñas de datos pero con tiempo mínimo de entrega garantizado.
Isochronous: usado para transferencias masivas de datos sin control de errores (máximo ancho de banda).
Cada endpoint tiene un número asociado y un tipo. El estándar USB reserva el endpoint 0 como un endpoint de control sobre el que el host (ordenador) envía los mensajes de configuración iniciales al dispositivo que acaba de conectarse.
La secuencia ya se describió en un post anterior en el que se abordó el mismo proyecto pero utilizando el microcontrolador ATmega32u4 de AVR pero la volvemos a indicar a continuación:
1. El host detecta que hay un dispositivo conectado (detecta una resistencia pull up en D+ o en D-)
2. El host inicia una secuencia de reset poniendo a nivel bajo las líneas D- y D+ durante al menos 2.5 us.
3. El host envía un paquete de SETUP para pedir el descriptor de dispositivo al dispositivo. Este descriptor indica el tipo de dispositivo, el código de fabricante, código de producto, etc. Esta primera petición se realiza siempre indicando en el campo longitud la longitud máxima y en la respuesta proveniente del dispositivo, el host es capaz de deducir el tamaño máximo de buffer con el que trabaja el dispositivo. Hay que tener en cuenta que en el caso de dospisitivos low-speed los paquetes son siempre de 8 bytes de datos mientras que en dispositivos full-speed los paquetes pueden ser de 8, 16, 32 o 64 bytes.
4. Tras esta primera petición de descripción de dispositivo el host suele iniciar de nuevo una condición de reset y, a continuación vuelve a pedir el descriptor de dispositivo pero con el tamaño ajustado al tamaño indicado por el dispositivo en la primera petición.
5. Cada dispositivo tiene asignada una dirección en el bus que, tras es reset, es siempre 0. En este instante lo habitual es que el host envíe un paquete de SETUP de tipo SET_ADDRESS para indicarle al dispositivo que a partir de ahora el host se va a comunicar con el dispositivo usando una dirección concreta diferente a 0 y que el dispositivo debe recordar para posteriores paquetes que se transmitan.
6. Ya con la nueva dirección de bus configurada, el host envía otro paquete de SETUP para solicitar el descriptor de configuración. Este descriptor es más grande que el anterior e incluye información sobre la clase de dipositivo y los endpoints que utiliza. El descriptor de dispositivo indica en un campo cuántas configuraciones posee el dispositivo, que suele ser siempre 1, por lo que el host normalmente sólo pide un descriptor de configuración.
7. El host (normalmente el driver instalado en el host) decide qué configuración quiere activar (que suele ser la única) en el dispositivo enviando un paquete de SETUP de tipo SET_CONFIGURATION. A partir de este instante el dispositivo queda conectado y con sus endpoints preparados para recibir y enviar datos propios de la funcionalidad del dispositivo.
La secuencia puede variar ligeramente en función del sistema operativo del host. Hay que recordar que en el protocolo USB el host es siempre el que envía "tokens" al dispositivo, incluso para traer datos desde el dispositivo. Cuando el host quiere enviar datos a un dispositivo hace transferencias de tipo SETUP y OUT mientras que cuando quiere recibir datos del dispositivo, el host hace transferencias de tipo IN pero siempre es el host el que pregunta. Un dispositivo no puede enviar datos a un host hasta que el host mande un token de tipo IN al dispositivo.
Implementación en el STM32F103
La serie STM32F103 es la serie más sencilla y baratita de toda la familia STM32 con soporte USB 2.0 full-speed (en el momento que escribo esto se puede conseguir una placa mínima de desarrollo con STM32F103 por menos de 3 ¤ en AliExpress). La documentación de referencia para programar el módulo USB es algo oscura y no está pensada para que te sumerjas mucho en ella, sino para que utilices la librería STM32Cube que, aunque es open source y permite un uso sin restricciones, su uso le quita toda la gracia al concepto de programar un microcontrolador desde cero :-).
A continuación puede verse la implementación de un dispositivo USB consistente en dos endpoints sencillos de tipo bulk (uno de entrada y otro de salida). La razón para implementar un dispositivo así es el hecho de que desde Linux el driver "usbserial" permite intercambiar datos con cualquier dispositivo USB que cumpla que tenga un endpoint bulk de salida y otro de entrada sin importar su clase, ni el código de fabricante ni de producto. Es un driver ideal para depurar dispositivos USB y que instancia un "/dev/ttyUSB0". Escribiendo en "/dev/ttyUSB0" se envían bytes a través del endpoint de salida mediante paquetes OUT mientras que leyendo de "/dev/ttyUSB0" se reciben bytes desde el dispositivo a través del endpoint de entrada mediante paquetes IN que envía el host.
La función usbDeviceInit se encarga de inicializar los tranceptores y de activar la interrupción de "USB Reset":
void usbDeviceInit() { // enable USB clock RCC_APB1ENR |= (((uint32_t) 1) << 23); // enable USB interrupts NVIC_ENABLE_IRQ(20); NVIC_SET_PRIORITY(20, 0); // highest priority // enable analog transceivers USB_CNTR &= ~(((uint16_t) 1) << 1); for (uint32_t i = 0; i < 20000; i++) ; USB_CNTR &= ~(((uint16_t) 1) << 0); USB_ISTR = 0; // enable and wait for USB RESET interrupt USB_CNTR |= (((uint16_t) 1) << 10); }
A continuación definimos los diferentes descriptores del dispositivo (descriptor de dispositivo, descriptor de configuración y descriptor de cadena 0 que indica los idiomas disponibles en el dispositivo):
const UsbDeviceDescriptor MyUsbDeviceDescriptor = { 0x12, // descriptor size 0x01, // descriptor type (device) 0x0110, // USB protocol version 1.10 0x00, 0x00, 0x00, 0x08, // max packet size for control endpoint 0 = 8 bytes 0xF055, // vendor id 0x0001, // product id 0x0100, 0x00, 0x00, 0x00, 0x01 // num configurations }; ... const UsbConfigurationDescriptor MyUsbConfigurationDescriptor = { 0x09, // descriptor size 0x02, // descriptor type (configuration) 0x0020, // configuration (9) + interface (9) + endpoint (7) + endpoint (7) = 32 0x01, // num interfaces = 1 0x01, // this configuration number = 1 0x00, 0x80, // bus powered (not self powered) 0x20, // 32 * 2 = 64 mA { // interface descriptor 0x09, // descriptor size 0x04, // descriptor type (interface) 0x00, // interface number (zero based) 0x00, 0x02, // num endpoints = 2 0xFF, // class = vendor defined 0xFF, // subclass = vendor defined 0x00, 0x00 }, { // in endpoint descriptor 0x07, // descriptor size 0x05, // descriptor type (endpoint) 0x81, // in endpoint 1 0x02, // bulk endpoint 0x0008, // max packet size = 8 bytes 0x0A // 10 ms for polling interval }, { // out endpoint descriptor 0x07, // descriptor size 0x05, // descriptor type (endpoint) 0x02, // out endpoint 2 0x02, // bulk endpoint 0x0008, // max packet size = 8 bytes 0x0A // 10 ms for polling interval } }; ... const UsbString0Descriptor MyUsbString0Descriptor = { 0x04, // descriptor size 0x03, // descriptor type (string descriptor) 0x0409 // 'en_US' language id }; const uint16_t MyUsbStatus = 0x0000;
Los buffers de recepción y transmisión USB en el caso de STM32 deben ser direccionados y accedidos de forma particular. Desde el punto de vista del subsistema USB, la anchura del bus de datos es de 16 bits, en lugar de 32 bits aunque los datos están alineados a 32 bits. Gráficamente se ve mejor:
Offset desde el punto de Offset desde el punto de
vista del controlador USB vista del programa (CPU)
0 0
1 1
2 4
3 5
4 8
5 9
6 12
Como se puede ver, por cada palabra de 32 bits direccionada desde la CPU sólo se puede acceder a los 16 bits menos significativos. Para leer los 2 primeros bytes de la memoria USB desde la CPU hay que acceder a los 4 primeros bytes de dicha memoria (como si fuese un entero de 32 bits) y quedarnos con los 16 bits menos significativos. Los siguientes 2 bytes no están en los 16 bits más significativos de la primera palabra de 32 bits, sino en los 16 bits menos significativos de la siguiente palabra de 32 bits y así sucesivamente. Teniendo en cuenta esta particularidad se implementan dos funciones de acceso a esta memoria USB para copiar hacia y desde ella:
void usbCopyFromPacketSRAM(volatile uint32_t *packetSRAMSource, volatile uint16_t *destination, uint16_t bytes) { volatile uint32_t *p = (volatile uint32_t *) packetSRAMSource; volatile uint16_t *q = destination; uint16_t n = bytes >> 1; if (bytes & 1) n++; for (uint16_t i = 0; i < n; i++, p++, q++) *q = (uint16_t) (*p & 0x0000FFFF); } void usbCopyToPacketSRAM(volatile uint16_t *source, volatile uint32_t *packetSRAMDestination, uint16_t bytes) { volatile uint32_t *p = (volatile uint32_t *) packetSRAMDestination; volatile uint16_t *q = source; uint16_t n = bytes >> 1; if (bytes & 1) n++; for (uint16_t i = 0; i < n; i++, p++, q++) *p = (uint32_t) *q; }
A continuación definimos las rutinas de interrupción correspondientes. Primero escribimos la rutina usbDeviceISRReset, que se ejecuta en caso de que se genere una interrupción de "USB Reset" provocada por una condición de reset en el bus USB. Dicha condición de reset es iniciada por el host en cuanto detecta un nuevo dispositivo conectado a una de sus bocas USB (es el paso 2 de la secuencia descrita anteriormente):
void usbDeviceISR() __attribute__ ((section(".usblp"))); ... void usbDeviceISRReset() { // prepare buffer descriptor table for endpoint 0 (control) USB_BTABLE = 0; // endpoint 0 (bidireccional) USB_ADDR0_TX = 24; USB_COUNT0_TX = 0; // 8 USB_ADDR0_RX = 32; USB_COUNT0_RX = (((uint16_t) 4) << 10); // 2 * 4 = 8 bytes // endpoint 1 (in, tx) USB_ADDR1_TX = 40; USB_COUNT1_TX = 0; // 8 USB_ADDR1_RX = 40; USB_COUNT1_RX = (((uint16_t) 4) << 10); // 2 * 4 = 8 bytes // endpoint 2 (out, rx) USB_ADDR2_TX = 48; USB_COUNT2_TX = 0; // 8 USB_ADDR2_RX = 48; USB_COUNT2_RX = (((uint16_t) 4) << 10); // 2 * 4 = 8 bytes // device address = 0 USB_DADDR = ((uint16_t) 1) << 7; // enable usb function usbNextAddress = 0; // prepare endpoint 0 for rx setup packets USB_EP0R = (((uint16_t) 1) << 9); usbDeviceEPRSetRxStat(USB_EP0R, STAT_NAK); usbDeviceEPRSetTxStat(USB_EP0R, STAT_NAK); usbDeviceEPRSetDtogRx(USB_EP0R, 0); usbDeviceEPRSetDtogTx(USB_EP0R, 0); // prepare endpoint 1 and endpoint 2 USB_EP1R = 1; usbDeviceEPRSetRxStat(USB_EP1R, STAT_NAK); usbDeviceEPRSetTxStat(USB_EP1R, STAT_VAL); usbDeviceEPRSetDtogRx(USB_EP1R, 0); usbDeviceEPRSetDtogTx(USB_EP1R, 0); USB_EP2R = 2; usbDeviceEPRSetRxStat(USB_EP2R, STAT_VAL); usbDeviceEPRSetTxStat(USB_EP2R, STAT_NAK); usbDeviceEPRSetDtogRx(USB_EP2R, 0); usbDeviceEPRSetDtogTx(USB_EP2R, 0); // enable complete transfer interrupt USB_CNTR |= (((uint16_t) 1) << 15); }
A continuación se define la rutina principal que atiende las interrupciones USB, usbDeviceISR. Esta función llama, en caso de darse una condición de reset a la función usbDeviceISRReset definida arriba:
void usbDeviceISR() { uint16_t istr = USB_ISTR; if (istr & (((uint16_t) 1) << 10)) { usbDeviceISRReset(); USB_ISTR = 0; } else if (istr & (((uint16_t) 1) << 15)) { // correct transfer interrupt USB_ISTR = 0; uint16_t epNum = istr & 0x000F; if (epNum == 0) { if (istr & 0x0010) { // out/setup packet if (USB_EP0R & (((uint16_t) 1) << 11)) { // setup packet usbCopyFromPacketSRAM((uint32_t *) USB_EP0RXBUF, usbRxBuffer, USB_COUNT0_RX & 0x03FF); UsbSetupPacket *setupPacket = (UsbSetupPacket *) usbRxBuffer; if ((setupPacket->bmRequestType == 0x80) && (setupPacket->bRequest == 0x06)) { bool stall = false; if ((setupPacket->wValue >> 8) == 1) { ep0DataPtr = (uint8_t *) &MyUsbDeviceDescriptor; // get_descriptor (device) ep0DataCount = (sizeof(MyUsbDeviceDescriptor) < setupPacket->wLength) ? sizeof(MyUsbDeviceDescriptor) : setupPacket->wLength; } else if ((setupPacket->wValue >> 8) == 2) { ep0DataPtr = (uint8_t *) &MyUsbConfigurationDescriptor; // get_descriptor (configuration) ep0DataCount = (sizeof(MyUsbConfigurationDescriptor) < setupPacket->wLength) ? sizeof(MyUsbConfigurationDescriptor) : setupPacket->wLength; } else if ((setupPacket->wValue >> 8) == 3) { ep0DataPtr = (uint8_t *) &MyUsbString0Descriptor; // get_descriptor (string) ep0DataCount = (sizeof(MyUsbString0Descriptor) < setupPacket->wLength) ? sizeof(MyUsbString0Descriptor) : setupPacket->wLength; } else { usart1SendString("\tg?"); usart1SendHexValue(setupPacket->wValue >> 8); usart1SendString("\r\n"); ep0DataCount = 0; stall = true; } if (stall) usbDeviceEPRSetTxStat(USB_EP0R, STAT_STA); else { uint16_t size = (ep0DataCount > 8) ? 8 : ep0DataCount; // copy bytes to packet SRAM usbCopyToPacketSRAM((uint16_t *) ep0DataPtr, (uint32_t *) USB_EP0TXBUF, size); USB_COUNT0_TX = size; ep0DataCount -= size; ep0DataPtr += size; usbDeviceEPRSetTxStat(USB_EP0R, STAT_VAL); } usbDeviceEPRSetRxStat(USB_EP0R, STAT_STA); } else if ((setupPacket->bmRequestType == 0x00) && (setupPacket->bRequest == 0x05)) { usbNextAddress = setupPacket->wValue; USB_COUNT0_TX = 0; usbDeviceEPRSetTxStat(USB_EP0R, STAT_VAL); usbDeviceEPRSetRxStat(USB_EP0R, STAT_STA); } else if ((setupPacket->bmRequestType == 0x00) && (setupPacket->bRequest == 0x09)) { USB_COUNT0_TX = 0; usbDeviceEPRSetTxStat(USB_EP0R, STAT_VAL); usbDeviceEPRSetRxStat(USB_EP0R, STAT_STA); } else if ((setupPacket->bmRequestType == 0x80) && (setupPacket->bRequest == 0x00)) { usbCopyToPacketSRAM((uint16_t *) &MyUsbStatus, (uint32_t *) USB_EP0TXBUF, 2); USB_COUNT0_TX = 2; usbDeviceEPRSetTxStat(USB_EP0R, STAT_VAL); usbDeviceEPRSetRxStat(USB_EP0R, STAT_STA); } else { usart1SendString("\tother setup packet\r\n"); usart1SendString("x: "); usart1SendHexValue(setupPacket->bmRequestType); usart1SendString(" "); usart1SendHexValue(setupPacket->bRequest); usart1SendString("\r\n"); } } else { // out packet usbCopyFromPacketSRAM((uint32_t *) USB_EP0RXBUF, usbRxBuffer, USB_COUNT0_RX & 0x03FF); // TODO process data } } else { // in packet if (usbNextAddress != 0) { USB_DADDR = (((uint16_t) 1) << 7) | (usbNextAddress & 0x007F); usbNextAddress = 0; } else { uint16_t size = (ep0DataCount > 8) ? 8 : ep0DataCount; usbCopyToPacketSRAM((uint16_t *) ep0DataPtr, (uint32_t *) USB_EP0TXBUF, size); USB_COUNT0_TX = size; ep0DataCount -= size; ep0DataPtr += size; usbDeviceEPRSetTxStat(USB_EP0R, STAT_VAL); usbDeviceEPRSetRxStat(USB_EP0R, STAT_VAL); } } USB_EP0R &= 0x0F0F; // ctr_rx = 0, ctr_tx = 0 } else if (epNum == 1) { if (istr & 0x0010) { // out packet } else { // in packet } usbDeviceEPRSetTxStat(USB_EP1R, STAT_VAL); usbDeviceEPRSetRxStat(USB_EP1R, STAT_NAK); USB_EP1R &= 0x0F0F; // ctr_rx = 0, ctr_tx = 0 } else if (epNum == 2) { if (istr & 0x0010) { // out packet usbCopyFromPacketSRAM((uint32_t *) USB_EP2RXBUF, usbRxBuffer, USB_COUNT2_RX & 0x03FF); usart1SendString("rx '"); usart1SendBytes((uint8_t *) usbRxBuffer, USB_COUNT2_RX & 0x03FF); usart1SendString("'\r\n"); } else { // in packet } usbDeviceEPRSetTxStat(USB_EP2R, STAT_NAK); usbDeviceEPRSetRxStat(USB_EP2R, STAT_VAL); USB_EP2R &= 0x0F0F; // ctr_rx = 0, ctr_tx = 0 } //USB_ISTR = 0; } }
Lo primero que hace la rutina es identificar el endpoint por el que se ha producido la transacción. En caso de que la transacción se haya producido a través del endpoint 0 se comprueba si es un token SETUP u OUT y, si es un token SETUP, se parsea y se mira a ver si el host está mandando algo (configuraciones) o si lo está pidiendo (descriptores). Si el host está pidiendo algo, hay que rellenar el buffer de transmisión con los datos que necesita, pues la siguiente transacción que realizará el host a través del endpoint 0 será utilizando uno o varios tokens IN y para entonces los datos tienen que estar ya preparados en dicho búffer.
Recordemos algunos elementos básicos sobre cómo son las transferencias USB a través del endpoint 0:
Control: Es un endpoint que debe ser siempre configurado como de tipo "Control" y es bidireccional. Un dispositivo puede definir endpoints de control adicionales pero el endpoint 0 de control siempre debe estar disponible.
Transacciones SETUP: Los endpoints configurados como de control permiten transferir un tipo especial de token denominado SETUP. Este token puede ser de entrada o de salida (siempre desde el punto de vista del host).
Transacciones SETUP de salida: El host manda un token SETUP, a continuación envía cero o más tokens OUT con datos anexos y por último manda un token IN para que el dispositivo mande 0 bytes a modo de ACK.
Transacciones SETUP de entrada: El host manda un token SETUP, a continuación envía cero o más tokens IN para recibir datos del dispositivo y al final el host manda un token OUT con 0 bytes anexos a modo de ACK hacia el dispositivo.
Si la transacción se ha producido en el endpoint 1 o 2, se asume que es una transacción simple de tipo bulk:
Endpoint 1: Es un endpoint configurado como de tipo IN y en esta implementación no hace nada, pues el STM32 no manda ningún dato cuando es leido a través del USB.
Endpoint 2: Es un endpoint configurado como de tipo OUT. Por lo tanto, el STM32 recibe por aquí los datos que son enviados desde el host y los manda formateados a través de la USART.
Nos limitamos a mandar por la USART1 todo lo que entra a través del endpoint de tipo "bulk out", mientras que las lecturas desde el host al endpoint de tipo "bulk in" devuelven siempre 0 bytes.
Para cargar el módulo "usbserial" en el kernel simplemente hay que hacer:
modprobe usbserial vendor=0xf055 product=0x0001
Esto nos permite comunicarnos con el dispositivo desde la misma shell:
echo "Hola, caracola" > /dev/ttyUSB1
Partiendo de este código se pueden implementar multitud de dispositivos USB en este microcontrolador (Mass storage, HID, DFU, etc.). Todo el código fuente puede descargarse desde la sección soft.
Quiero agradecer a Jian Jiao (mculabs.net) la ayuda prestada a la hora de comprender algunos entresijos en la programación del módulo USB del microcontrolador STM32.
[ añadir comentario ] ( 2296 visualizaciones ) | [ 0 trackbacks ] | enlace permanente
Tweet | |
( 3 / 4466 ) Calendario
Calendario




