
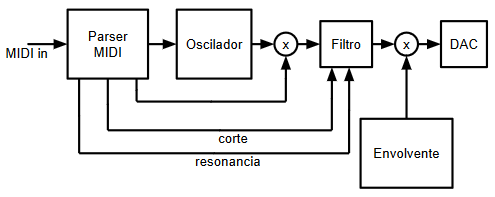
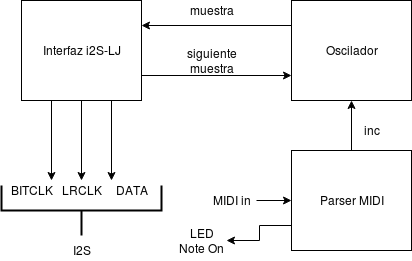
Este sería el diagrama de bloques de esta segunda iteración:
Parser MIDI mejorado
En la versión iniciar el parser MIDI no se tuvieron en cuenta algunas características "raras" que se dan el algunos teclados controladores y al mismo tiempo se asumía que un "note off" posterior a un "note on" siempre era de la misma tecla, lo cual es demasiado suponer, sobre todo cuando quien toca es un humano. Cuando un humano toca una secuencia de notas en un teclado (por ejemplo: La, Mi, Do) uno puede pensar que los mensaje que manda el teclado controlador son los siguientes:
noteOn(La), noteOff(La), noteOn(Mi), noteOff(Mi), noteOn(Do), noteOff(Do)
Sin embargo lo cierto es que a veces un humano pulsa la siguiente tecla al mismo tiempo o antes de soltar la anterior:
noteOn(La), noteOn(Mi), noteOff(La), noteOff(Mi), noteOn(Do), noteOff(Do)
Con la anterior versión del parser, que asumía que un noteOff se correspondía siempre con el noteOn inmediatamente anterior, lo que ocurría era que cuando al sinte le llegaba el noteOff(La) callaba la nota Mi disparada justo antes porque asumía que ese noteOff se correspondía con dicha nota Mi. En la nueva versión del parse este noteOff(Mi) es ignorado por la máquina de estados por lo que la respuesta del sintetizador es más natural.
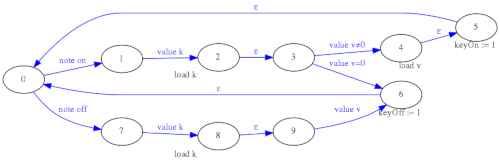
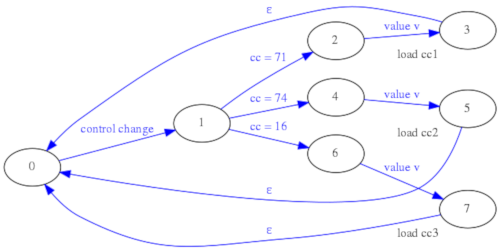
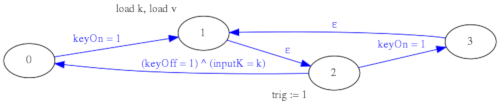
Para mejorar el comportamiento y la funcionalidad del parser MIDI se ha optado por un diseño basado en máquinas de estado en serie y en paralelo en lugar de una única máquina de estados grande. El parser MIDI se ha divido en dos etapas (Stage1 y Stage2), la primera etapa genera señales "KeyOn" y "KeyOff" limpias por cables separados y además implementa en paralelo una máquina de estados aparte para procesar los mensajes de "Control Change". En la segunda etapa se implementa la lógica anteriormente descrita de ignorar los "Note Off" que no se corresponden con el mensaje "Note On" inmediatamente anterior.
De esta forma, aunque aparentemente se ha complicado el diseño, se han separado los problemas y es más sencillo introducir modificaciones y depurar errores en las máquinas de estado. Cada una por separado es más sencilla y fácil de trazar que una hipotética máquina de estados única para todo.
Además de la mejora en el procesado de los mensajes "Note On" y "Note Off", este parser ya reconoce mensajes de tipo "Control Change", en concreto para tres valores prefijados de controlador: 71, 74 y 16, que se asignarán en el sintetizador a la frecuencia de corte del filtro, la resonancia del filtro y la ganancia de entrada del filtro.
Filtro paso bajo de segundo orden
Se ha optado por la implementación estándar de un filtro de estado variable (state variable filter). Se trata de un filtro de segundo orden (dos polos) que genera simultáneamente 3 salidas:
- paso bajo (con pendiente de filtrado de 12 dB/octava)
- paso alto (con pendiente de filtrado de 12 dB/octava)
- paso banda (con pendiente de filtrado de 6 dB/octava)
No son grandes pendientes de filtrado pero siempre se pueden mejorar poniendo varios filtros en cascada. La implementación que se ha utilizado es la descrita en el libro "Musical Applications of Microprocessors" de Hal Chamberlin (dicha implementación ya fue usada sobre un microcontrolador en este post). El filtro de estado variable viene determinado por el siguiente sistema de ecuaciones en diferencias finitas:
$$pasoAlto[n] = entrada - ({r \times pasoBanda[n-1]}) - pasoBajo[n]$$
$$pasoBanda[n] = ({f \times pasoAlto[n]}) + pasoBanda[n - 1]$$
$$pasoBajo[n] = ({f \times pasoBanda[n - 1]}) + pasoBajo[n - 1]$$
Siendo:
$$f = 2\sin\left({\pi F_c \over F_s}\right)$$
$$r = {1 \over Q}$$
Siendo $F_c$ la frecuencia de corte del filtro, $F_s$ la frecuencia de muestreo y $Q$ la Q del filtro (la resonancia).
Si se reordenan las ecuaciones en diferencias:
$$pasoBajo[n] = ({f \times pasoBanda[n - 1]}) + pasoBajo[n - 1]$$
$$pasoAlto[n] = entrada - ({r \times pasoBanda[n - 1]}) - pasoBajo[n]$$
$$pasoBanda[n] = ({f \times pasoAlto[n]}) + pasoBanda[n - 1]$$
Podemos olvidarnos de los índices:
pasoBajo += f * pasoBanda
pasoAlto = entrada - (r * pasoBanda) - pasoBajo
pasoBanda += f * pasoAlto
Como se puede apreciar es preciso mantener en memoria (registro) al menos las variables pasoBajo y pasoBanda entre que se procesa una muestra y la siguiente (se trata de un filtro digital de segundo orden).
Para implementar dicho filtro sobre FPGA lo que necesitaremos serán básicamente los siguientes elementos:
- Al menos tres registros en los que almacenaremos los valores "pasoBajo", "pasoBanda" y "pasoAlto" (aunque realmente podríamos no gastar un registro para "pasoAlto", lo vamos a incluir para poder disponer de esa salida en el módulo).
- Una unidad de suma con multiplicación: Un módulo combinacional que realiza la operación: A = (B * C) + D (en muchos casos D = A, por lo que se puede ver como A += B * C)
- Una máquina de estados para controlar qué operandos y operaciones se hacen en cada momento.
Con estos elemento y teniendo en cuenta las ecuaciones anteriores, podemos hacer una propuesta de secuenciación de operaciones como sigue:
1. LP := (cutoff * BP) + LP
2. HP := (0 * x ) + IN
3. HP := (-reso * BP) + HP
4. HP := (-1 * LP) + HP
5. BP := (cutoff * HP) + BP
Cada paso requiere un único ciclo de reloj por lo que bastará con implementar una máquina de estados que, por cada muestra que llegue, pase por los 5 estados de forma secuencial para que los registros LP, BP y HP (LowPass, BandPass y HighPass) tengan los valores de salida del filtro que necesitamos. Nótese que será preciso utilizar aritmética de punto fijo y en nuestro caso se ha optado por un formato Q16.16 (16 bits de parte entera y 16 bits de parte fraccionaria).
A continuación puede verse como quedaría la implementación del filtro en VHDL:
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity StateVariableFilter is port ( Reset : in std_logic; Clk : in std_logic; EnableIn : in std_logic; SampleIn : in std_logic_vector(15 downto 0); CutOffIn : in std_logic_vector(31 downto 0); -- 0..1 fixed point Q16.16 ResonanceIn : in std_logic_vector(31 downto 0); -- 0..1 fixed point Q16.16 SampleOut : out std_logic_vector(15 downto 0); EnableOut : out std_logic ); end entity; architecture RTL of StateVariableFilter is signal LPDBus : std_logic_vector(31 downto 0); signal LPQBus : std_logic_vector(31 downto 0); signal HPDBus : std_logic_vector(31 downto 0); signal HPQBus : std_logic_vector(31 downto 0); signal BPDBus : std_logic_vector(31 downto 0); signal BPQBus : std_logic_vector(31 downto 0); signal MultOperandA : std_logic_vector(31 downto 0); signal MultOperandB : std_logic_vector(31 downto 0); signal MultResult64 : std_logic_vector(63 downto 0); signal MultResult : std_logic_vector(31 downto 0); signal AddOperandB : std_logic_vector(31 downto 0); signal AddResult : std_logic_vector(31 downto 0); signal NegResonance : std_logic_vector(31 downto 0); signal FSMDBus : std_logic_vector(2 downto 0); signal FSMQBus : std_logic_vector(2 downto 0); begin process (Clk) begin if (Clk'event and (Clk = '1')) then LPQBus <= LPDBus; end if; end process; process (Clk) begin if (Clk'event and (Clk = '1')) then HPQBus <= HPDBus; end if; end process; process (Clk) begin if (Clk'event and (Clk = '1')) then BPQBus <= BPDBus; end if; end process; process (Clk) begin if (Clk'event and (Clk = '1')) then FSMQBus <= FSMDBus; end if; end process; NegResonance <= std_logic_vector(to_signed(-to_integer(signed(ResonanceIn)), 32)); MultOperandA <= CutOffIn when ((FSMQBus = "001") or (FSMQBus = "101")) else NegResonance when (FSMQBus = "011") else std_logic_vector(to_signed(-65536, 32)) when (FSMQBus = "100") else -- -65536 es -1 en notación Q16.16 std_logic_vector(to_signed(0, 32)); MultOperandB <= LPQBus when (FSMQBus = "100") else BPQBus when ((FSMQBus = "001") or (FSMQBus = "011")) else HPQBus; AddOperandB <= LPQBus when (FSMQBus = "001") else BPQBus when (FSMQBus = "101") else HPQBus when ((FSMQBus = "011") or (FSMQBus = "100")) else std_logic_vector(to_signed(to_integer(signed(SampleIn)), 32)); --MultResult64 <= std_logic_vector(to_signed(to_integer(signed(MultOperandA)) * to_integer(signed(MultOperandB)), 64)); MultResult64 <= std_logic_vector(signed(MultOperandA) * signed(MultOperandB)); MultResult <= MultResult64(47 downto 16); --AddResult <= std_logic_vector(to_signed(to_integer(signed(MultResult)) + to_integer(signed(AddOperandB)), 32)); AddResult <= std_logic_vector(signed(MultResult) + signed(AddOperandB)); LPDBus <= std_logic_vector(to_signed(0, 32)) when (Reset = '1') else AddResult when (FSMQBus = "001") else LPQBus; HPDBus <= std_logic_vector(to_signed(0, 32)) when (Reset = '1') else AddResult when ((FSMQBus = "011") or (FSMQBus = "100") or (FSMQBus = "010")) else HPQBus; BPDBus <= std_logic_vector(to_signed(0, 32)) when (Reset = '1') else AddResult when (FSMQBus = "101") else BPQBus; -- fsm -- LP += cutoff * BP -- HP = in - (resonance * BP) - LP -- BP += cutoff * HP FSMDBus <= "000" when ((Reset = '1') or (FSMQBus = "110")) else -- MultOperandA MultOperandB AddOperandB "001" when ((FSMQBus = "000") and (EnableIn = '1')) else -- LP := cutoff * BP + LP "010" when (FSMQBus = "001") else -- HP := 0 * x + IN "011" when (FSMQBus = "010") else -- HP := -reso * BP + HP "100" when (FSMQBus = "011") else -- HP := -1 * LP + HP "101" when (FSMQBus = "100") else -- BP := cutoff * HP + BP "110" when (FSMQBus = "101") else "000"; EnableOut <= '1' when (FSMQBus = "110") else '0'; SampleOut <= std_logic_vector(to_signed(-32768, 16)) when (to_integer(signed(LPQBus)) < -32768) else std_logic_vector(to_signed(32767, 16)) when (to_integer(signed(LPQBus)) > 32767) else LPQBus(15 downto 0); end architecture;
La máquina de estados espera hasta que la entrada "EnableIn" se ponga a "1", dicho evento es la señal que indica al filtro que debe realizar una iteración (i.e. calcular la siguiente muestra a partir de la entrada "SampleIn").
Todo el código está disponible en la sección soft.
[ 1 comentario ] ( 2602 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |


 ( 3 / 5150 )
( 3 / 5150 )Tradicionalmente, la síntesis y el procesado de sonido digital siempre se ha delegado a nivel hardware en el uso de DSPs. El uso de FPGAs para sustituir DSPs es una tendencia actual derivada del abaratamiento de las FPGAs y de la incursión de las mismas dentro del mundo de la electrónica amateur y DIY. Actualmente una FPGA media tiene suficiente potencia para llevar a cabo múltiples operaciones DSP a una velocidad incluso mayor. El problema con las FPGAs es la forma de programarlas, que requiere un pensamiento abstracto de tipo diferente al razonamiento algorítmico tradicional que se utiliza para programar CPUs y DSPs estándar. Este post se introducirá en el diseño y la implementación de un sintetizador monofónico muy simple sobre una FPGA.
La idea
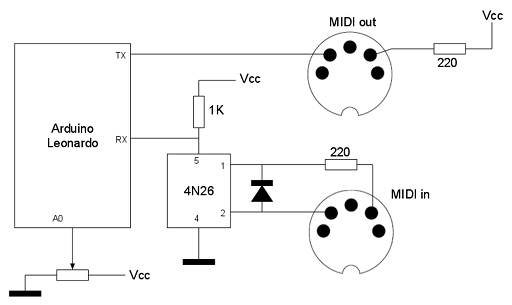
La idea de esta primera versión es implementar un sintetizador monofónico con un único oscilador de diente de sierra, que sólo lea mensajes de tipo NoteOn y NoteOff y que reproduzca el sonido a través de un DAC I2S.
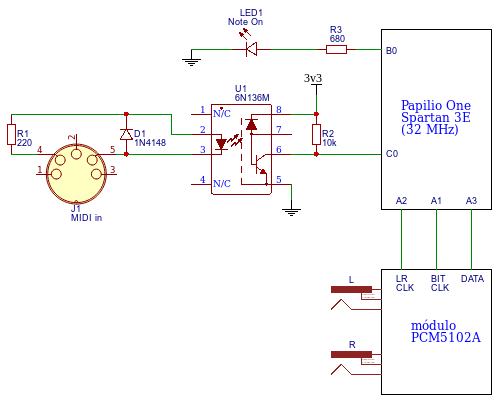
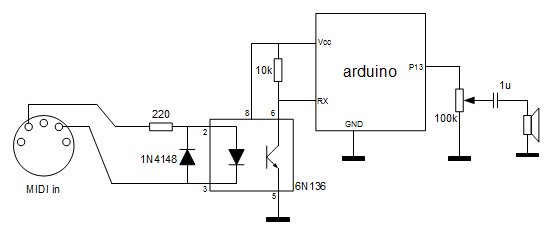
Como se puede apreciar se trata del típico circuito de entrada MIDI con optoacoplador más un PCM5102A como DAC I2S de alta calidad. Los mensajes MIDI de NoteOn se traducen en tonos que genera el oscilador.
El interfaz de salida I2S para el DAC externo
El protocolo I2S es un estándar definido para transportar sonido digital a muy cortas distancias (dentro de una misma placa, por ejemplo). Es estándar de facto en casi la totalidad de los conversores DAC y ADC de alta calidad del mercado de todos los fabricantes y se trata de un protocolo relativamente ligero y fácil de implementar.
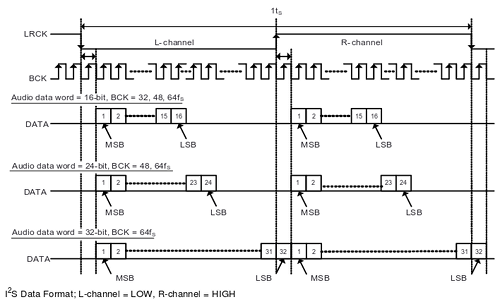
(imagen © Texas Instruments Incorporated, extraida con permiso de la hoja de datos del PCM5102A)
Existe una variante del I2S denominada "Left Justified" que simplifica el uso del reloj LR, evitando el desfase de un bit entre el envío de cada palabra para el canal izquierdo y el canal derecho:
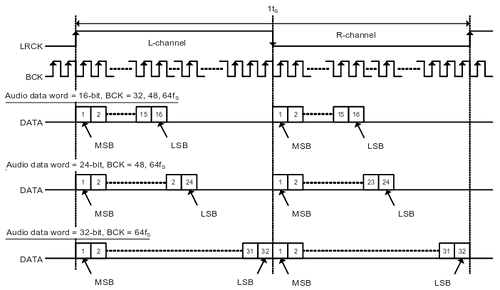
(imagen © Texas Instruments Incorporated, extraida con permiso de la hoja de datos del PCM5102A)
Y que es la variante I2S que se ha usado en este proyecto ya que es más fácil de implementar que el estándar original y actualmente todos los DACs del mercado la soportan. A continuación puede verse lo que sería el diagrama de bloques de la interfaz I2S-LJ dentro de la FPGA:
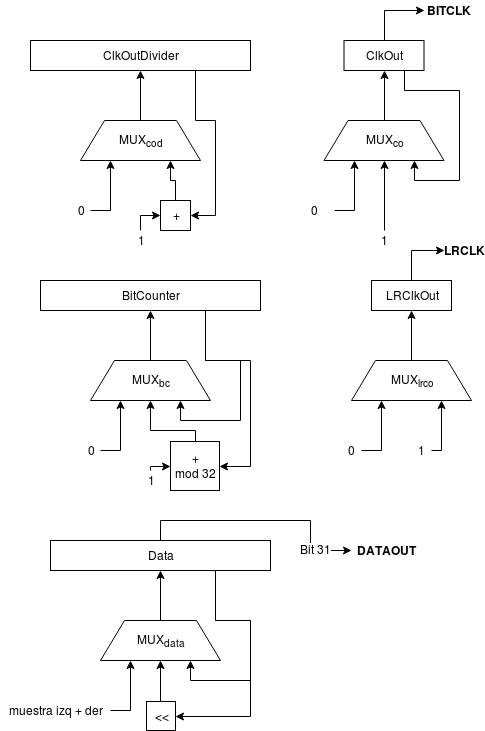
Las diferentes tablas de verdad de cada uno de los bloques combinacionales serían las siguientes:
| Entradas | Salidas | |
|---|---|---|
| ClkOutDivider == 22 | Reset | MUXcod |
| 0 | 0 | + |
| 0 | 1 | 0 |
| 1 | X | 0 |
| Entradas | Salidas | ||
|---|---|---|---|
| ClkOutDivider == 22 | ClkOutDivider == 10 | Reset | MUXco |
| 1 | 0 | 1 | 0 |
| 0 | 1 | 0 | 1 |
| en otro caso | ClkOut | ||
| Entradas | Salidas | |
|---|---|---|
| ClkOutDivider == 22 | Reset | MUXbc |
| X | 1 | 0 |
| 1 | 0 | + mod 32 |
| en otro caso | BitCounter | |
| Entradas | Salidas | |
|---|---|---|
| BitCounter < 16 | Reset | MUXlrco |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | X | 1 |
| Entradas | Salidas | |
|---|---|---|
| ClkOutDivider == 22 | BitCounter == 31 | MUXdata |
| 0 | X | data |
| 1 | 0 | << |
| 1 | 1 | muestra izq + der |
Como se puede apreciar el mecanismo se basa en meter en un registro de desplazamiento de 32 bits las dos palabras de 16 bits de cada canal (izquierdo + derecho) e ir emitiendo bit a bit ese registro cambiando la polaridad de la señal LRCLK cada 16 bits para indicar canal izquierdo o canal derecho.
El oscilador
El oscilador se ha implementado como un sencillo acumulador de fase.
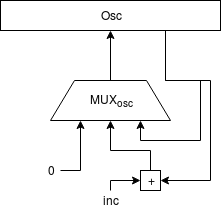
Como lo que se busca es un oscilador de diente de sierra, lo más sencillo es aprovechar el comportamiento natural de cualquier acumulador que, cuando se desborda "da la vuelta". Esto simplifica enormemente todo el diseño ya que, de forma natural, la señal resultante tiene forma de diente de sierra.
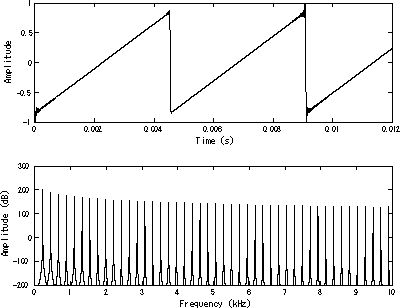
(imagen de dominio público extraida de Wikipedia)
Por cada nueva muestra que debe ser calculada, el acumulador es incrementado en una cantidad determinada, lo que provoca que su valor crezca de forma lineal (la rampa del diente de sierra). Al cabo de una cantidad suficiente de muestras, el acumulador se desbordará y "dará la vuelta" empezando de nuevo desde abajo (el "pico" del diente de sierra).
La cantidad que se use para ir incrementando el acumulador de fase determinará la frecuencia de la señal del oscilador:
$$DivisorFrecuenciaRelojI2S = {{32000000 Hz \over 44100 Hz} \over 32 bits}$$
$$inc = {{f \times 65536} \over {{32000000Hz \over DivisorFrecuenciaRelojI2S} \over 32 bits}} \times 65536$$
El incremento (inc) debe estar en formato Q16.16 (punto fijo de 16 bits de parte entera y 16 bits de parte fraccionaria), que es el formato usado por el acumulador de fase del oscilador.
Nótese que el oscilador no se incrementa en cada ciclo de reloj de la FPGA, sino cada vez que se requiere una nueva muestra por parte de la interfaz I2S-LJ para emitirla al DAC.
El parser MIDI
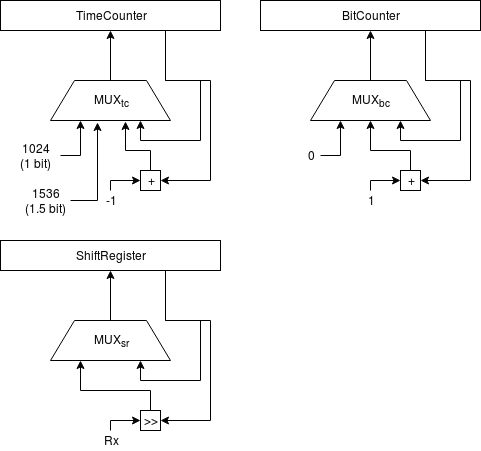
El módulo de procesamiento MIDI se encarga de implementar un receptor UART sencillo a 31250 baudios y una máquina de estados que vaya leyendos los datos MIDI de entrada y determinando en cada momento si hay que reproducir una nota en el oscilador (y con qué frecuencia) o no.
La UART se implementa de forma muy sencilla usando un registro de desplazamiento y un contador para medir el tiempo equivalente a 1.5 bits y a 1 bit.
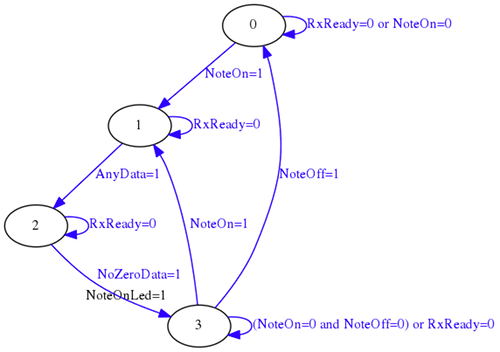
Y usando la siguiente máquina de estados:
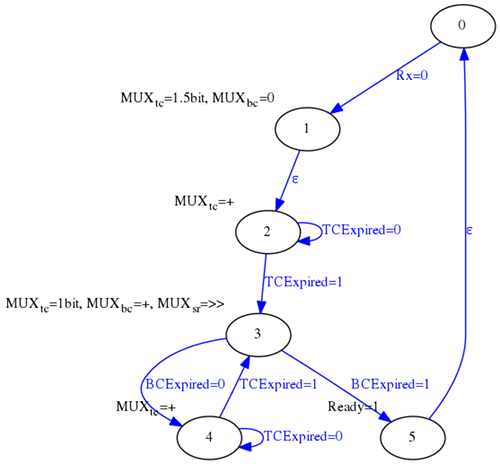
En una entrada anterior de este blog se abordó este proyecto de forma separada. Lo que se ha hecho en este caso ha sido simplificar aquel esquema para que cupiese todo dentro de un único fichero VHDL.
Una vez implementado el receptor UART, el parser MIDI se puede implementar mediante una sencilla máquina de estados que sólo detecte eventos NoteOn y NoteOff.
El parser MIDI en este caso no sólo determina qué nota debe ser reproducida, sino que usando una ROM interna, determina el valor de incremento que debe ser usado por el módulo oscilador para generar el tono correspondiente.
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity NotesRom is port ( AddressIn : in std_logic_vector(6 downto 0); DataOut : out std_logic_vector(31 downto 0) ); end entity; architecture RTL of NotesRom is type RomType is array (0 to 127) of std_logic_vector(31 downto 0); constant Data : RomType := ( x"00000000", -- note 0 x"000cdf51", -- note 1 x"000da345", -- note 2 x"000e72df", -- note 3 x"000f4ed1", -- note 4 x"001037d7", -- note 5 x"00112eb9", -- note 6 x"00123449", -- note 7 x"00134966", -- note 8 x"00146efe", -- note 9 x"0015a60b", -- note 10 x"0016ef97", -- note 11 . . . . . . . . . x"368d1251", -- note 122 x"39cb7a59", -- note 123 x"3d3b4348", -- note 124 x"40df5cc9", -- note 125 x"44bae33a", -- note 126 x"48d12253" -- note 127 ); begin DataOut <= Data(to_integer(unsigned(AddressIn))); end architecture;
Para generar este conjunto de valores se hizo un pequeño programa en C++ que convirtió el valor de cada nota MIDI en el valor de incremento correspondiente para que el oscilador emita a esa frecuencia:
#include <iostream> #include <iomanip> #include <stdint.h> #include <math.h> using namespace std; double getFreq(uint8_t midiNote) { const double A4_FREQ = 440; const int32_t A4_MIDI_NOTE = 69; return A4_FREQ * pow(2.0, ((double) (((int32_t) midiNote) - A4_MIDI_NOTE)) / 12.0); } uint32_t getInc(uint8_t midiNote) { const uint32_t CLK_FREQ = 32000000; const uint32_t SAMPLE_RATE = 44100; double freq = getFreq(midiNote); double div = (((double) CLK_FREQ) / SAMPLE_RATE) / 32; double inc = (freq * 65536) / ((CLK_FREQ / div) / 32); uint32_t ret = round(inc * 65536); return ret; } int main() { for (uint8_t n = 0; n < 128; n++) cout << "\t\tx\"" << hex << setw(8) << setfill('0') << getInc(n) << "\", -- note " << dec << setw(0) << setfill(' ') << ((int) n) << endl; return 0; }
Compilando este programa y ejecutándolo, genera en la salida estándar los valores de incremento de todas las 127 notas MIDI posibles:
g++ -c -o notes_rom_generator.o notes_rom_generator.cc
g++ -o notes_rom_generator notes_rom_generator.o
./notes_rom_generator
Todo junto
A la hora de ponerlo todo junto, basta con interconectar los tres bloques:
Implementación sobre cualquier FPGA
La implementación se ha desarrollado sobre una Spartan3E de Xilinx a 32 MHz pero el proyecto se puede meter en cualquier FPGA siempre y cuando se ajusten las ecuaciones y las constantes para tener en cuenta las diferentes frecuencias de reloj. En caso de que queramos meter el sintetizador en una FPGA que vaya a otra frecuencia de reloj habría que realizar los siguientes cambios:
1. Las constantes CLK_OUT_DIV y CLK_OUT_DIV_BITS de LJI2SOutput.vhd deben se recalculadas.
2. Las constantes TIME_COUNTER_BITS, TIME_COUNTER_1BIT y TIME_COUNTER_1_5BIT de UartRx.vhd deben ser recalculadas.
3. La constante CLK_FREQ dentro de notes_rom_generator.cc debe ser cambiada, hay que recompilar el programa y colocar la salida generada como los nuevos valores de NotesRom.vhd.
Todo el código fuente puede descargarse de la sección soft.
[ añadir comentario ] ( 3824 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 5299 )El efecto "shuffle" o "swing" es un efecto muy utilizado en producción musical para humanizar y meter mas "groove" a canciones reproducidas por un secuenciador. El efecto consiste básicamente en adelantar o atrasar el disparo de determinadas notas durante algunos milisegundos para dar sensación de "humanidad" a la cadencia de la música. A lo largo de este post se abordará la implementación en C++ sobre Arduino de un "shuffler" MIDI para secuencias 4/4.
La forma más estándar de "shuffle" en secuencias musicales de 4/4 es la que consiste en retrasar una cantidad de tiempo determinada (milisegundos) la segunda y la cuarta semicorchea después de cada negra:
*----.----.----.----*----.----.----.----*----.----.----.----*----.----.----.---- Compás 4/4 estándar
*------.--.------.--*------.--.------.--*------.--.------.--*------.--.------.-- Compás de 4/4 con "shuffle"
Los asteriscos determinan las negras (4 negras por cada compás de 4/4) y los puntos determinan las semicorcheas (4 semicorcheas por cada negra). El concepto es muy sencillo, aunque a la hora de implementarlo en MIDI hay que tener en cuenta algunos aspectos importantes.
Protocolo MIDI
El protocolo MIDI es un protocolo muy sencillo por el que se envían eventos e información musical. No es objetivo de este post el explicar el protocolo ni los mensajes MIDI (cualquier búsqueda sobre "midi protocol" en la red nos dará acceso a centenares de páginas donde lo explican muy bien) aunque sí nos centraremos en los mensajes que más nos interesan de cara a implementar nuestro shuffler.
Dentro de los mensajes MIDI hay unos especiales denominados de tiempo real que son transmitidos por los secuenciadores cuando están reproduciendo una secuencia MIDI pregrabada:
0xF8: "timing clock" se envía 24 veces por cada negra.
0xFA: "start" indica que se va a iniciar la reproducción de una secuencia. Este mensaje es seguido de forma inmediata por el primer 0xF8.
0xFB: "continue" indica que se reanuda la secuencia por donde se paró.
0xFC: "stop" indica que se para la secuencia.
Por tanto, si en nuestro secuenciador musical tenemos una canción con un tempo de 120 negras por minuto, al emitir dicha secuencia por un cable MIDI, de forma intercalada con los mensaje de activación y desactivación de las notas y demás, irán entremezclados mensajes 0xF8 a razón de 24 por cada negra, es decir:
$${{120 \times 24} \over 60} = 48\;mensajes/segundo$$
Nótese que la cantidad de mensajes 0xF8 enviados por unidad de tiempo no depende de la velocidad de transmisión MIDI, sino del tempo de la secuencia musical que se esté reproduciendo. Si cada vez que nos llegue un mensaje 0xF8 desde el secuenciador vamos contando de 0 a 23 dando la vuelta de nuevo a 0 cada vez que llegamos a 24 tenemos que los mensaje 0xF8 coinciden en el tiempo con las negras y semicorcheas de la forma que indica la siguiente tabla:
n s s s
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
En esta tabla se puede ver que la negra (el beat) coincide con el contador de mensajes 0xF8 recibidos a 0 mientras que las tres semicorcheas siguientes coinciden con ese mismo contador a 6, a 12 y a 18. Ahora tenemos una base de tiempo sólida que podemos aprovechar para implementar nuestro efecto shuffle: Lo que hay que hacer es atrasar en el tiempo los mensajes de "note on" y "note off" que lleguen entre el instante 6 y el 12 y entre el instante 18 y 0 de la siguiente negra.
n s s s
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
+--------> atrasar +--------> atrasar
Dicho atraso no puede ser tal que nuestro shuffler emita notas fuera de orden por lo que el retraso en el tiempo debe ser proporcional (una nota que llegue entre los instantes 6 y el 7 será atrasada más que una que llegue entre los instantes 9 y 10 pero la primera nunca debe emitirse depués de la segunda, debemos garantizar el orden de llegada de los eventos "note on" y "note off").
Algoritmo propuesto
El MIDI shuffler se plantea como un filtro MIDI, un dispositivo con una entrada MIDI y una salida MIDI que se intercala entre el secuenciador y los sintetizadores. La salida MIDI del secuenciador irá conectada a la entrada MIDI del shuffler y la salida MIDI del shuffler irá conectada a la entrada MIDI de los secuenciadores. A continuación se plantea una propuesta de pseudocódigo para el MIDI shuffler:
iniciarShuffler
estado := ESPERAR_START_MIDI
fin iniciarShuffler
getInstanteAtrasado(t)
ret := (tamSemicorchea - tamReducido) + ((t + tamReducido) / tamSemicorchea)
devolver ret
fin getInstanteAtrasado
byteMIDIRecibido(byte)
enviar := SÍ
si (estado = ESPERAR_START_MIDI) entonces
si (byte = 0xFA) entonces
colaRetraso.borrar()
estado := ESPERAR_PRIMER_CLOCK_MIDI
fin sin
en otro caso, si (estado = ESPERAR_PRIMER_CLOCK_MIDI) entonces
si (byte = 0xF8) entonces
estado := ESPERAR_CLOCK_MIDI
contadorReloj := 6
indiceSemicorchea := 0
timer.iniciar()
fin si
en otro caso, si (estado = ESPERAR_CLOCK_MIDI) entonces
si (byte = 0xF8) entonces
contadorReloj := contadorReloj - 1
si (contadorReloj = 0) entonces
si ((indiceSemicorchea = 0) ó (indiceSemicorchea = 2)) entonces
tamSemicorchea = timer.getValor()
tamReducido = (temSemicorchea * (100 - PERCENT)) / 100
fin si
contadorReloj := 6
indiceSemicorchea := (indiceSemicorchea + 1) mod 4
timer.parar()
timer.iniciar()
fin si
en otro caso, si (esEventoNota(byte) y ((indiceSemicorchea = 1) ó (indiceSemicorchea = 3)) entonces
t := getInstanteAtrasado(timer.getValor())
colaRetraso.meter({byte, t})
enviar := NO
en otro caso, si (byte = 0xFC)
estado := ESPERAR_START_MIDI
fin si
fin si
si (enviar = SÍ) entonces
enviar(byte)
fin si
fin byteMIDIRecibido
principal
siempre hacer
si ((indiceSemicorchea = 1) ó (indiceSemicorchea = 3)) entonces
t := timer.getValor()
mientras (colaRetraso.hayAlgo()) hacer
d := colaRetraso.getCabeza()
si (d.t <= t) entonces
colaRetraso.sacar()
enviar(d.byte)
en otro caso
salir del bucle
fin si
fin mientras
fin si
fin siempre
fin principal
Lo que hace el algoritmo es aprovechar el intervalo entre el midi clock 0 y el 5 para calcular el tiempo en unidades de timer que dura una semicorchea. El objeto "timer" es un timer de bastante resolución que se arranca en el instante 0 y se para en el instante 6. En ese instante 6, una vez parado el timer, se anota la cuenta del mismo como tamSemicorchea (para indicar que es el tamaño en ticks de nuestro contador de lo que dura una semicorchea) y se calcula tamReducido a partir del porcentaje de "shuffle" que queramos (un shuffle del 0% da un tamReducido = tamSemicorchea, mientras que un shuffle del 100% da un tamReducido = 0).
instante semicorchea acción
0 0 Iniciar timer de alta resolución
1
2
3
4
5
6 1 Anotar cuenta del timer, pararlo
7 y volver a iniciarlo. Encolar cualquier
8 evento "note on" o "note off" que llegue
9 en este intervalo calculando su instante
10 de emisión con una regla de tres.
11
12 2 La misma que la semicorchea 0
13
14
15
16
17
18 3 La misma que la semicorchea 1
19
20
21
22
23
Entre los instantes 6 y el 11 lo que se hace es encolar los eventos de "note on" y "note off" que vayan llegando calculándoles en el momento que llegan, en qué instante del tick del timer deben ser transmitidos haciendo una regla de tres (en getInstanteAtrasado) y metiendo cada una de estas parejas de valores (byte e instante que debe ser transmitido) en la cola "colaRetraso".
Lo mismo se hace para los instantes de tiempo 12 al 17 y 18 al 23, respectivamente.
Ya tenemos los eventos atrasados metidos en una cola (para garantizar que el orden de emisión sea el mismo que el de recepción), ahora lo que hay que hacer es emitirlos en el instante que corresponda. y de esto se encarga el procedimiento principal en su bucle infinito. Este procedimiento principal ejecuta un bucle infinito que lo que hace es inspeccionar si hay algo que enviar en la cola "colaRetraso", si hay algo que debe ser enviado (su instante de envío es menor o igual al valor actual del timer) lo envía y lo quita de la cola. El procedimiente byteMIDIRecibido es invocado cada vez que llega un byte por el puerto MIDI.
El circuito
El MIDI shuffler, como se comentó antes, hace de filtro MIDI con una entrada y una salida. La cantidad de efecto shuffle se controla mediante un potenciómetro conectado a una de las entradas analógicas del Arduino.
Con el potenciómetro al mínimo se aplica un efecto shuffle del 0% (sin efecto shuffle) mientras que con el potenciómetro al máximo se aplica un efecto shuffle del 50% (valores superiores al 50% genera unos resultados muy extremos).
Implementación en C++
A pesar de que en el algoritmo propuesto el procedimiento byteMIDIRecibido se supone que es invocado de forma asíncrona por el sistema cada vez que llega un byte por el puerto MIDI, lo cierto es que es más sencillo si en la rutina de interrupción de la UART encolamos los bytes MIDI que van llegando por la entrada MIDI y luego los vamos sirviendo en el bucle principal antes de comprobar el estado de la colaRetraso, haciéndolo de esta forma evitamos colisiones y la necesidad de hacer que colaRetraso sea reentrante.
int32_t MIDIShuffler::getDelayedInstant(int32_t sourceInstant) { return ((this->sixteenthNoteLength - this->reducedLength) + ((sourceInstant * this->reducedLength) / this->sixteenthNoteLength)); } void MIDIShuffler::byteReceived(uint8_t byte) { this->rxQueue.push(byte); } void MIDIShuffler::processRxByte(uint8_t byte) { bool send = true; uint8_t noChannelByte = byte & 0xF0; if (this->status == STATUS_WAIT_START_MIDI_CLOCK) { if (byte == 0xFA) { this->delayQueue.clear(); this->rxQueue.clear(); this->status = STATUS_WAIT_FIRST_MIDI_CLOCK; } } else if (this->status == STATUS_WAIT_FIRST_MIDI_CLOCK) { if (byte == 0xF8) { this->status = STATUS_WAIT_MIDI_CLOCK; this->clockCounter = CLOCK_PER_SIXTEENTH_NOTE; this->sixteenthNoteIndex = 0; this->timeCounter->start(); } } else if (this->status == STATUS_WAIT_MIDI_CLOCK) { if (byte == 0xF8) { this->clockCounter--; if (this->clockCounter == 0) { if ((this->sixteenthNoteIndex == 0) || (this->sixteenthNoteIndex == 2)) { this->sixteenthNoteLength = this->timeCounter->getValue(); this->reducedLength = (this->sixteenthNoteLength * (100 - this->percentProvider->getPercent())) / 100; } this->clockCounter = CLOCK_PER_SIXTEENTH_NOTE; this->sixteenthNoteIndex = (this->sixteenthNoteIndex + 1) & 3; // ... % 4 this->timeCounter->stop(); this->timeCounter->start(); } } else if ((noChannelByte < 0xA0) && ((this->sixteenthNoteIndex == 1) || (this->sixteenthNoteIndex == 3)) && !this->byPass) { DelayedMIDIByte d(this->getDelayedInstant(this->timeCounter->getValue()), byte); this->delayQueue.push(d); send = false; } else if (byte == 0xFC) this->status = STATUS_WAIT_START_MIDI_CLOCK; } if (send && (this->sender != NULL)) this->sender->sendByte(byte); } void MIDIShuffler::init(MIDISender &sender, PercentProvider &percentProvider, TimeCounter &timeCounter) { MIDIFilter::init(sender); this->percentProvider = &percentProvider; this->delayQueue.clear(); this->rxQueue.clear(); this->status = STATUS_WAIT_START_MIDI_CLOCK; this->timeCounter = &timeCounter; this->byPass = false; this->sixteenthNoteIndex = 0; } void MIDIShuffler::run() { if (this->rxQueue.hasElements()) { uint8_t byte = this->rxQueue.getHead(); this->processRxByte(byte); this->rxQueue.pop(); } if (((this->sixteenthNoteIndex == 1) || (this->sixteenthNoteIndex == 3)) && this->delayQueue.hasElements()) { int32_t t = this->timeCounter->getValue(); while (this->delayQueue.hasElements()) { DelayedMIDIByte d = this->delayQueue.getHead(); if (d.t <= t) { this->delayQueue.pop(); if (this->sender != NULL) this->sender->sendByte(d.byte); } else break; } } }
A continuación puede verse un vídeo con el MIDI shuffler en acción (obviamente, hay que poner el audio para que se oiga :-) )
Todo el código fuente puede descargarse de la sección soft.
[ añadir comentario ] ( 3559 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 16496 )La placa Teensy 3.1 (ARM Cortex M4) dispone de un puerto I2S para la transferencia de audio digital. Si combinamos esta salida con un buen DAC de alta fidelidad el resultado es espectacular :-)
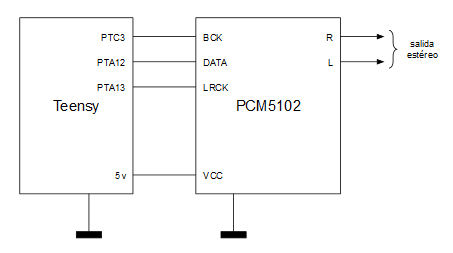
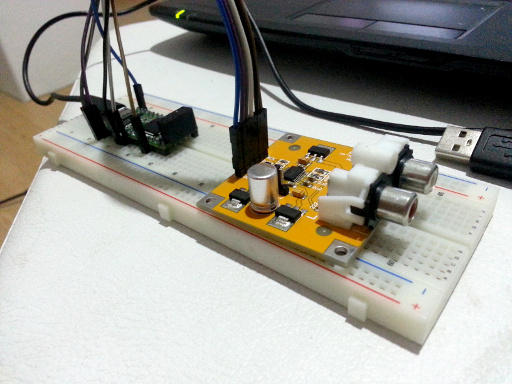
El DAC de Texas Instruments PCM5102 es un DAC que soporta el estándar I2S de transferencia de audio digital y el estándar left justified (variante del I2S). Existen muchos otros DACs de audio en el mercado con soporte para estos formatos, sin embargo los más usados son el ES9023 y derivados, de ESS, y el PCM5102 y derivados, de Texas Instruments. En mi caso, adquirí una placa con un integrado PCM5102A y la circuitería mínima (componentes pasivos, espadines para conectar alimentación y las tres líneas del protocolo I2S y dos conectores RCA hembra de salida, uno para cada canal).
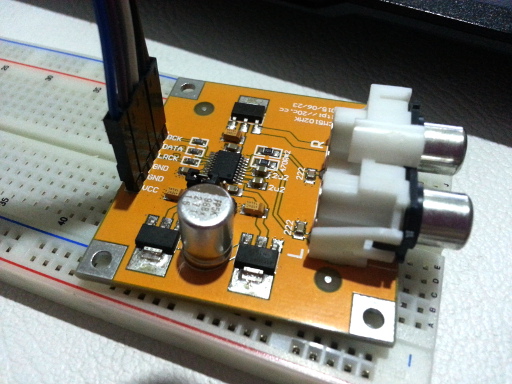
Unos 14 por AliExpress (gastos de envío incluidos), aunque ahora creo que está incluso más barato.
I2S
El protocolo I2S es un protocolo muy sencillo de transferencia de audio digital. Aunque por su nombre puede parecer que es un protocolo derivado o parecido al protocolo I2C, lo cierto es que sólo se parecen en el nombre y, para nuestro alivio, es bastante más sencillo que el I2C.
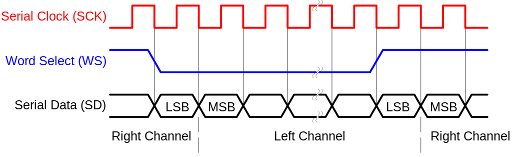
(imagen extraida de Wikimedia, realizada por el usuario Wdwd y con licencia Creative Commons Attribution 3.0 Unported)
El protocolo, como se puede ver en el diagrama, solo necesita de tres hilos: uno para datos, otro para el reloj y otro para seleccionar la palabra o el frame (ponemos esta señal a 0 para enviar la muestra del canal izquierdo y a 1 para enviar la muestra del canal derecho).
Al tratarse de un protocolo de transferencia serie, si queremos emitir audio con calidad CD (16 bits a 44100 Hz estéreo) hace falta generar un reloj de:
$$44100 \times 16 \times 2 = 1411200 \thinspace Hz$$
Como se puede ver, si se quiere trabajar con frecuencias de muestreo lo suficientemente altas como para asegurar una mínima calidad de audio, es necesario hardware dedicado: generar esas señales por software es muy ineficiente. En nuestro caso el microcontrolador MK20 de Freescale (ARM Cortex-M4) que viene en la placa Teensy sí que viene equipado con un interface I2S totalmente programable.
El interface I2S en el microcontrolador MK20
El interface I2S tiene dos modos: directo y mediante DMA. En esta primera aproximación he implementado el modo directo (sin DMA). Es el modo que más CPU consume pero también es el más sencillo. Los pasos para configurar la interface de salida I2S en el MK20 son, grosso modo, los siguientes:
1. Configurar el multiplexor de pines para asignar las tres señales a pines reales.
2. Configurar el los divisores de frecuencia para obtener el bit clock de I2S a partir del reloj del sistema.
3. Configurar el tamaño de palabra (16 bits estéreo en nuestro caso).
4. Colgar de la IRQ 35 la función encargada de escribir las muestras en el registro de datos I2S.
5. Habilitar la IRQ 35 (vector de interrupción 16 + 35 = 51 del ARM Cortex-M4).
Configurar el multiplexor de pines es muy sencillo. En este caso he optado por usar la configuración ALT6 para los pines PORTA.12, PORTA.13 y PORTC.3 que les dan la funcionalidad TX, FS (frame select, el equivalente a "word select") y BCLK (bit clock) respectivamente.
Para configurar el BCLK se dispone de un divisor de frecuencia fraccionario y de un divisor de frecuencia entero. Si quisiéramos usar una frecuencia de muestreo de 48KHz haríamos los siguiente:
1. Establecemos como fuente de reloj, el reloj del núcleo (SYSCLK) que, en nuestro caso, va a 96 MHz.
2. El divisor de frecuencia fraccionario lo configuramos con el valor: 16 / 125 (96 * 16 / 125 = 12.288 MHz).
3. El divisor de frecuencia entero lo configuramos a continuación con el valor 8: 12.288 / 8 = 1.536 MHz).
En este caso: 48 KHz * 2 * 16 = 1.536 MHz.
El resto de pasos es mejor verlos en el código:
bool i2sInit() { // configure i/o pins // (PTA12 = TX, PTA13 = FS, PTC3 = BCLK) --> ALT6 PORTA_PCR12 = ((uint32_t) 6) << 8; PORTA_PCR13 = ((uint32_t) 6) << 8; PORTC_PCR3 = ((uint32_t) 6) << 8; // enable system clock for i2s module SIM_SCGC6 |= ((uint32_t) 1) << 15; // select input clock 0 and output enable I2S0_MCR = ((uint32_t) 1) << 30; #if (I2S_SAMPLE_RATE == 48000) // divide to get the 12.2880 MHz from 96MHz (96 * (16/125)) I2S0_MDR = (((uint32_t) 15) << 12) | ((uint32_t) 124); #elif (I2S_SAMPLE_RATE == 44100) // divide to get the 11.2896 MHz from 96MHz (96 * (2/17)) I2S0_MDR = (((uint32_t) 1) << 12) | ((uint32_t) 16); #elif (I2S_SAMPLE_RATE == 32050) // divide to get the 8.2051 MHz from 96MHz (96 * (10/117)) I2S0_MDR = (((uint32_t) 9) << 12) | ((uint32_t) 116); #else #error "I2S_SAMPLE_RATE must be 48000, 44100 or 32050" #endif // re-enable system clock to the i2s module SIM_SCGC6 |= ((uint32_t) 1) << 15; // disable tx (TE=0) while configuring I2S0_TCSR &= ~(((uint32_t) 1) << 31); // transmitter remains enabled until (and TE set) the end of the current frame for (int i = 0; (i < 1000) && (I2S0_TCSR & (((uint32_t) 1) << 31)); i++) ; if (I2S0_TCSR & (((uint32_t) 1) << 31)) return false; // no word mask I2S0_TMR = 0; // set FIFO watermark I2S0_TCR1 = ((uint32_t) (I2S_FRAME_SIZE - 1)); // use asynchronous mode (SYNC=0), BCLK polatiry active low (BCP=0), select master clock 1 (MSEL=1), bit clock divide (DIV=3), BCLK internally generated I2S0_TCR2 = (((uint32_t) 1) << 25) | (((uint32_t) 1) << 26) | ((uint32_t) 3) | (((uint32_t) 1) << 24); // transmit data channel is enabled (TCE=1) I2S0_TCR3 = (((uint32_t) 1) << 16); // frame size (FRSZ), bits per frame sync (SYWD), MSB (MF=1), I2S standard (not "left justified") (FSE=1), frame sync in master mode (FSD) I2S0_TCR4 = (((uint32_t) (I2S_FRAME_SIZE - 1)) << 16) | (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 8) | (((uint32_t) 1) << 4) | (((uint32_t) 1) << 3) | ((uint32_t) 1); // bits per word for first word in each frane (W0W), bits per word for rest of words in each frame (WNW), bit index for first bit tx (MSB, 15-th for 16 bit) //I2S0_TCR5 = (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 16) | (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 24) | (((uint32_t) 15) << 8); I2S0_TCR5 = (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 16) | (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 24) | (((uint32_t) (I2S_IO_BIT_DEPTH - 1)) << 8); return true; } void i2sStart() { wavePtr = (int16_t *) &_binary_drum_loop_16_raw_start; NVIC_ENABLE_IRQ(IRQ_I2S0_TX); // tx enable (TE=1), bit clock enable (BCE=1), FIFO request interrupt enable, FIFO reset I2S0_TCSR |= (((uint32_t) 1) << 31) | (((uint32_t) 1) << 28) | (((uint32_t) 1) << 8) | (((uint32_t) 1) << 25); } void i2sStop() { NVIC_DISABLE_IRQ(IRQ_I2S0_TX); }
Además de lo dicho, es necesario colgar de la IRQ 35 una rutina que será invocada tantas veces por segundo como indique la frecuencia de muestreo y que será la encargada de escribir en el registro de salida I2S las muestras de audio que se van a emitir por la interface I2S. Definimos la rutina de la siguiente manera dentro del codigo C++:
extern char _binary_drum_loop_16_raw_start; extern char _binary_drum_loop_16_raw_end; volatile char *p; void i2sTx() __attribute__ ((section(".i2s_tx"))); volatile int16_t *wavePtr; void i2sTx() { // if FRF=0, return if (!(I2S0_TCSR & (((uint32_t) 1) << 16))) return; // write left and right sample I2S0_TDR0 = (uint32_t) *wavePtr; I2S0_TDR0 = (uint32_t) *wavePtr; wavePtr++; if (wavePtr >= ((int16_t *) &_binary_drum_loop_16_raw_end)) wavePtr = (int16_t *) &_binary_drum_loop_16_raw_start; // if underrun, clear underrun if (I2S0_TCSR & (((uint32_t) 1) << 18)) I2S0_TCSR |= (((uint32_t) 1) << 18); // if frame sync error, clear frame sync error flag if (I2S0_TCSR & (((uint32_t) 1) << 19)) I2S0_TCSR |= (((uint32_t) 1) << 19); }
Y en el linker script de nuestro proyecto incluimos una seccion especial a la que llamaremos .cortex_m4_vector_i2s_tx y que ubicamos en la direccion de memoria 0x000000CC (la correspondiente a la IRQ 35). En esta sección ponemos la dirección de memoria de nuestra rutina de servicio de interrupción (la encargada de escribir las muestras), es decir metemos la dirección de memoria I2S_TX_ADDRESS + 1 (recordar que al tratarse de un Cortex-M, el reportorio de instrucciones es siempre el reportorio thumb y, por lo tanto, los destinos de salto para subrutinas y para codigo siempre deben tener su bit 0 a 1).
SECTIONS {
. = 0x00000000 ;
.cortex_m4_vectors : {
LONG(0x20007FFC);
LONG(0x00000411);
}
. = 0x000000CC ;
.cortex_m4_vector_i2s_tx : {
LONG(I2S_TX_ADDRESS + 1);
}
. = 0x00000400 ;
.flash_configuration : {
LONG(0xFFFFFFFF);
LONG(0xFFFFFFFF);
LONG(0xFFFFFFFF);
LONG(0xFFFFFFFE);
}
.text : {
_linker_code = . ;
init.o (.text)
*(.text)
*(.text.*)
*(.rodata*)
*(.gnu.linkonce.t*)
*(.gnu.linkonce.r*)
}
I2S_TX_ADDRESS = . ;
.i2s_tx : {
*(.i2s_tx)
}
.preinit_array : {
__preinit_array_start = . ;
*(.preinit_array)
__preinit_array_end = . ;
}
...resto del linker script...
Audio de ejemplo
Se ha partido de un sample de dominio público consistente en dos golpes de bombo y caja con charles en medio, típicos del estilo de música house. La muestra se emite en 16 bits con una frecuencia de muestreo de 32050 Hz (Se ha usado este frecuencia por razones de espacio en la memoria flash: es una frecuencia que permite reproducir a una calidad buena manteniendo un tamaño lo suficientemente limitado como para caber en la memoria flash del microcontrolador).
Todo el código fuente puede descargarse de la sección soft.
[ añadir comentario ] ( 3629 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 16568 )Versión iniciar y muy básica de un minisintetizador mononfónico de onda cuadrada con entrada MIDI y basado en Arduino. Por ahora sólo reconoce mensajes MIDI "NOTE ON" y "NOTE OFF".
El procesador del Arduino se encarga simplemente de parsear los mensajes MIDI: Genera los tonos y los silencios ante las tramas NOTE ON y NOTE OFF que detecta por la entrada MIDI.
#define MIDI_NOTE_LOW 16
#define MIDI_NOTE_HIGH 107
// midi frequencies from C0 to B7
int freq[] = {
21, 22, 23, 24, 26, 28, 29, 31,
33, 35, 37, 39, 41, 44, 46, 48, 52, 55, 58, 62,
65, 69, 73, 78, 82, 87, 92, 98, 104, 110, 117, 123,
131, 139, 147, 156, 165, 175, 185, 196, 208, 220, 233, 247,
262, 277, 294, 311, 329, 349, 370, 392, 415, 440, 466, 494,
523, 554, 587, 622, 659, 698, 740, 784, 831, 880, 932, 988,
1047, 1109, 1175, 1245, 1319, 1397, 1480, 1568, 1661, 1760, 1864, 1976,
2093, 2217, 2349, 2489, 2637, 2794, 2960, 3136, 3322, 3520, 3729, 3951
};
#define MIDI_STATUS_WAIT_STATUS 0
#define MIDI_STATUS_WAIT_NOTE 1
#define MIDI_STATUS_WAIT_VELOCITY 2
#define MIDI_STATUS_WAIT_NOTE_OR_STATUS 3
#define SPEAKER_PIN 13
int midiStatus = MIDI_STATUS_WAIT_STATUS;
int midiNote = 0;
int midiVelocity = 0;
void setup() {
Serial1.begin(31250);
}
void parseMidi(int b) {
if (midiStatus == MIDI_STATUS_WAIT_STATUS) {
if ((b & 0xF0) == 0x90)
midiStatus = MIDI_STATUS_WAIT_NOTE;
}
else if (midiStatus == MIDI_STATUS_WAIT_NOTE) {
midiNote = b;
midiStatus = MIDI_STATUS_WAIT_VELOCITY;
}
else if (midiStatus == MIDI_STATUS_WAIT_VELOCITY) {
midiVelocity = b;
midiStatus = MIDI_STATUS_WAIT_STATUS;
if (midiVelocity == 0)
noTone(SPEAKER_PIN);
else {
if ((midiNote >= MIDI_NOTE_LOW) && (midiNote <= MIDI_NOTE_HIGH))
tone(SPEAKER_PIN, freq[midiNote - MIDI_NOTE_LOW]);
}
midiStatus = MIDI_STATUS_WAIT_NOTE_OR_STATUS;
}
else if (midiStatus == MIDI_STATUS_WAIT_NOTE_OR_STATUS) {
if (b < 0x80) {
midiNote = b;
midiStatus = MIDI_STATUS_WAIT_VELOCITY;
}
else if ((b & 0xF0) == 0x90)
midiStatus = MIDI_STATUS_WAIT_NOTE;
else
midiStatus = MIDI_STATUS_WAIT_STATUS;
}
}
void loop() {
while (Serial1.available() > 0) {
int b = Serial1.read();
parseMidi(b);
}
}
Como se puede ver, el parseado de las tramas MIDI se realiza mediante un sencillo autómata finito (DFA) de 4 estados.
[ añadir comentario ] ( 2910 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 6256 ) Calendario
Calendario





{kind=link}
{kind=link}