
Motivación
En la anterior entrada del blog se realizó un pequeño proyecto para generar dos efectos de sonido utilizando un sencillo chip PSG, el SN76489. Los sonidos generados fueron muy buenos pero a nivel hardware, como el objetivo del montaje es una futura integración en un pequeño robot con mando a distancia, me encontré con que, el hecho de tener que cablear todo un bus de 8 bits junto con los pines OE y READY, consumía muchos pines del STM32 (el robot consume ya GPIO y PWM para las ruedas, UART para la comunicación e I2C para una pequeña pantalla OLED).
Una primera aproximación válida sería un conversor serie a paralelo de tipo I2C o algo así pero instalar DOS chips sólo para generar dos ruidos rudimentarios me pareció excesivo, por lo que opté por una solución basada en un CPLD.
64 macroceldas
Ese es el reto: hacer un generador de sonido que consuma, como mucho, 64 macroceldas en un CPLD de la serie MAX3000A de Intel, en concreto el EPM3064.
64 macroceldas son 64 biestables con la lógica combinatoria asociada. No es un reto sencillo y es probable que los resultados no tengan tan buena calidad como con un PSG, pero el beneficio que se consigue en reducción de pines, miniaturización y reducción de consumo (Un CPLD consume mucho para los estándares actuales, pero el SN76489 consume más) hace que valga la pena intentarlo.
El circuito
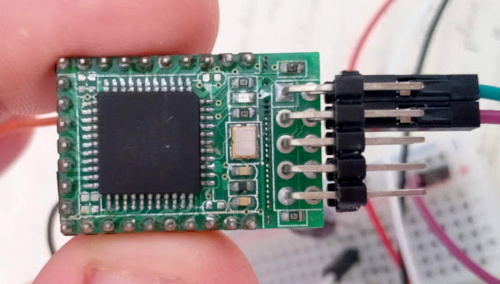
Se plantea un circuito sencillo con dos entradas configuradas en lógica negativa y circuitería antirrebote básica y una salida con condensador de desacoplo y divisor de tensión para evitar sobretensiones en el amplificador de audio de la salida. La placa equipada con el CPLD EPM3064 incluye un oscilador a 50 MHz conectado a uno de los pines de reloj del CPLD y un led con su cátodo conectado a otro de los pines del CPLD (se enciende cuando se emite un 0 por ese pin).
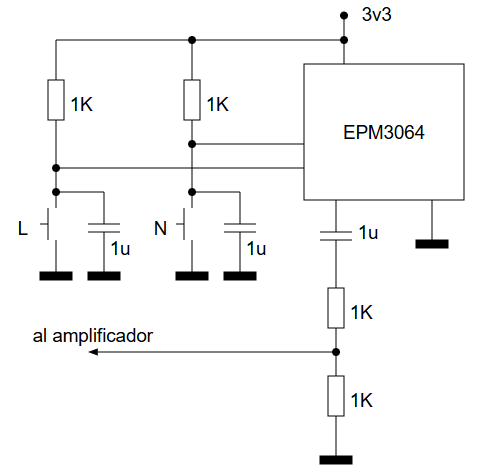
Diagrama de bloques
A continuación puede verse el diagrama del bloques que se ha implementado en el CPLD.
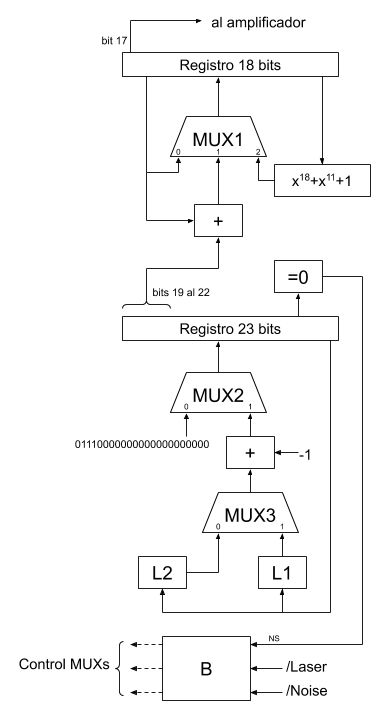
El bloque $x^{18} + x^{11} + 1$ se corresponde con el LFSR maximal de grado 18 que permite generar ruido blanco (aproximado) en el registro de arriba.
L1 es un bloque combinacional que emite un 1 si la entrada vale 0 y la entrada sin cambiar en caso contrario.
| L1 | |
|---|---|
| Entrada | Salida |
| 0 | 1 |
| x | x |
L2 es un bloque combinacional que emite 8193 si la entrada vale 0 y la entrada sin cambiar en caso contrario.
| L2 | |
|---|---|
| Entrada | Salida |
| 0 | 8193 |
| x | x |
B es el bloque combinacional encargado de controlar los multiplexores en función de las señales de entrada y del cruce por cero del registro de 23 bits:
| B | |||||
|---|---|---|---|---|---|
| Entradas | Salidas (MUX) | ||||
| /Laser | /Noise | NS | 1 | 2 | 3 |
| 1 | 1 | dc | 1 | 1 | 1 |
| 0 | dc | dc | 0 | 0 | dc |
| 1 | 0 | 0 | 0 | 1 | 0 |
| 1 | 0 | 1 | 2 | 1 | 0 |
Descripción funcional
Cuando se activa la entrada /Laser (se pone a nivel bajo), se carga en el registro de 23 bits el valor "01110000000000000000000", este valor se carga para que los 4 bits más significativos tengan el valor "0111". Si nos fijamos los 4 bits más significativos del registro de 23 bits se utlizan para incrementar el valor del registro de 18 bits. Dicho registro de 18 bits actúa como acumulador de fase para una señal de onda cuadrada correspondiente al bit más significativo (bit 17) de este registro.
Si tenemos un registro de 18 bits como acumulador de fase y una frecuencia de reloj de 50 MHz (la de la placa que estamos usando) tendremos una frecuencia del bit más significativo de:
$$f_{out} = {f_{clk} \over 2^{18}}$$
De forma general, en caso de que apliquemos incrementos arbitrarios a este registro de desplazamiento, obtendremos una frecuencia en el bit más significativo de:
$$f_{out} = Inc \times {f_{clk} \over 2^{18}} = Inc \times {50000000 \over 2^{18}}$$
Para simular el sonido de un disparo láser lo que generamos es una caida rápida en frecuencia por lo que empezamos con un $Inc = 7$ cuando /Laser = 0 (de ahí los 4 bits más significativos del valor 01110000000000000000000), este valor de incremento genera una frecuencia en el bit más significativo del registro de 18 bits de:
$$Inc = 7 \Rightarrow f_{out} = 7 \times {50000000 \over 2^{18}} = 1335.1 Hz$$
Cuando /Laser vuelve al valor 1, vamos bajando el valor de Inc (los 4 bits más significativos del registro de 23 bits) hasta que vale 0:
$$Inc = 6 \Rightarrow f_{out} = 1144.4 Hz$$
$$Inc = 5 \Rightarrow f_{out} = 953.67 Hz$$
$$Inc = 4 \Rightarrow f_{out} = 762.94 Hz$$
$$Inc = 3 \Rightarrow f_{out} = 572.2 Hz$$
$$Inc = 2 \Rightarrow f_{out} = 381.47 Hz$$
$$Inc = 1 \Rightarrow f_{out} = 190.73 Hz$$
$$Inc = 0 \Rightarrow f_{out} = 0 Hz$$
Como el registro de 23 bits también actúa como un acumulador de fase (pues se decrementa en bloque, no solo los bits más significativos), la caida es lo suficientemente lenta como para ser audible (que es lo que queremos). Nótese que una vez cae a 0, el registro de 23 bits se queda ahí estancado gracias al circuito combinacional L1 que actúa como limitador, lo que, en la práctica, provoca que el registro de 18 bits "pare" de oscilar (pues $Inc = 0$ siempre). Nótese también que, aunque pare de oscilar, es posible que a la salida que va hacia el amplificador (el bit 17) se quede un "1" de forma pemanente, es por ello por lo que se hace necesario colocar siempre un condensador de desacoplo a la salida.
Si lo que se pone a 0 es la entrada /Noise y la entrada /Laser permanece a 1, lo que se hace es seleccionar como realimentación del registro de 18 bits la salida del polinomio LFSR, que provocará una secuencia de números pseudoaleatorios (ruido) en el bit 17 (salida del amplificador). La carga del valor del LFSR no se produce en cada ciclo del reloj de 50 MHz, pues provocaría ruido no audible, sino que se aprovecha el registro de desplazamiento de 23 bits y, a través del circuito combinacional L2, se hace que "desborde" en 8192, por lo que el registro de 18 bits cambiará con una frecuencia de:
$$f_{muestreo} = {50000000 \over 8192} = 6103.5 Hz$$
por lo que el ruido resultante ocupará aproximadamente hasta la banda de los 3 KHz. No es un ruido blanco pero a efectos audibles es muy parecido al ruido generado por un PSG.
Código fuente
Todo el código fuente en VHDL puede meterse dentro de una sola entidad:
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity Epm3064GunSound is port ( Clk : in std_logic; TrigLaserIn : in std_logic; TrigNoiseIn : in std_logic; SpeakerOut : out std_logic; LedOut : out std_logic ); end entity; architecture Architecture1 of Epm3064GunSound is signal LFSRD : std_logic_vector(17 downto 0); signal LFSRQ : std_logic_vector(17 downto 0); signal LFSRRawOut : std_logic_vector(17 downto 0); signal LFSROut : std_logic_vector(17 downto 0); signal LFSRMux : std_logic_vector(1 downto 0); signal TimerD : std_logic_vector(22 downto 0); signal TimerQ : std_logic_vector(22 downto 0); signal TimerMux : std_logic; signal Limited1TimerQ : std_logic_vector(22 downto 0); signal Limited2TimerQ : std_logic_vector(22 downto 0); signal LimiterMux : std_logic; signal LimiterMuxOut : std_logic_vector(22 downto 0); signal NoiseSample : std_logic; begin -- LFSR process (Clk) begin if (Clk'event and (Clk = '1')) then LFSRQ <= LFSRD; end if; end process; --LFSRRawOut <= (LFSRQ(0) xor LFSRQ(3)) & LFSRQ(19 downto 1); 20 bits LFSRRawOut <= (LFSRQ(0) xor LFSRQ(7)) & LFSRQ(17 downto 1); -- 18 bits LFSROut <= LFSRRawOut when (unsigned(LFSRRawOut) /= 0) else std_logic_vector(to_unsigned(1, 18)); LFSRD <= LFSROut when (LFSRMux = "10") else std_logic_vector(unsigned(LFSRQ) + unsigned(TimerQ(22 downto 19))) when (LFSRMux = "01") else LFSRQ; SpeakerOut <= LFSRQ(17); -- timer process (Clk) begin if (Clk'event and (Clk = '1')) then TimerQ <= TimerD; end if; end process; Limited1TimerQ <= std_logic_vector(to_unsigned(1, 23)) when (signed(TimerQ) = 0) else TimerQ; Limited2TimerQ <= std_logic_vector(to_unsigned(8192 + 1, 23)) when (signed(TimerQ) = 0) else TimerQ; LimiterMuxOut <= Limited1TimerQ when (LimiterMux = '1') else Limited2TimerQ; TimerD <= std_logic_vector(signed(LimiterMuxOut) - 1) when (TimerMux = '1') else "01110000000000000000000"; NoiseSample <= '1' when (signed(TimerQ) = 0) else '0'; -- operation logic LFSRMux <= "01" when (((TrigLaserIn = '1') and (TrigNoiseIn = '1')) or (TrigLaserIn = '0')) else "10" when ((TrigLaserIn = '1') and (TrigNoiseIn = '0') and (NoiseSample = '1')) else "00"; TimerMux <= '0' when (TrigLaserIn = '0') else '1'; LimiterMux <= '1' when ((TrigLaserIn = '1') and (TrigNoiseIn = '1')) else '0'; LedOut <= TrigLaserIn and TrigNoiseIn; end architecture;
Resultados
Con este circuito se consiguen unos resultados similares a los obtenidos utilizando el chip SN76489, con menos circuitería, ocupando menos pines y menos tiempo de procesamiento en el microcontrolador: nótense que ahora sólo necesitamos dos pines GPIO del microcontrolador (uno para /Laser y otro para /Noise).
Todo el código fuente puede descargarse de la sección soft.
[ añadir comentario ] ( 2682 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |


 ( 3 / 3732 )
( 3 / 3732 )Programación embebida no bloqueante mediante máquinas de estado en C++. Caso de uso con el chip de sonido SN76489
El uso de máquinas de estado en un recurso casi obligatorio a la hora de implementar código no bloqueante, para dotar a los sistemas de algún tipo de funcionalidad multi-tarea o simplemente como mecanismo de ahorro de energía. En este post se estudiará un caso de uso: la programación del chip de sonido SN76489, mediante esta técnica de desarrollo y utilizando parte del potencial del lenguaje C++ moderno para ello.Descripción funcional
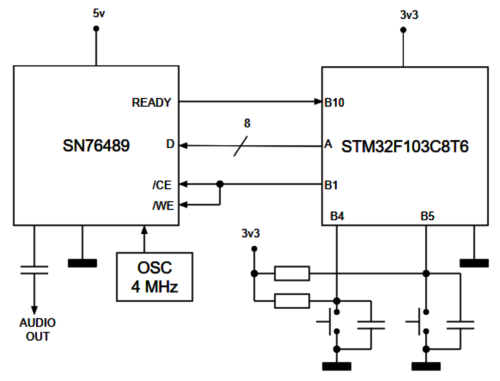
El objetivo es hacer un pequeño montaje basado en el ARM Cortex-M3 STM32F103C8T6 como MCU y en el chip de sonido SN76489 (3 canales de tono más un canal de ruido, utilizado en las antiguas consolas de Sega y en algunas placas de recreativas de los años 80 y 90).
Dicho montaje incluye dos pulsadores externos: uno para generar un sonido de disparo "láser" y otro para generar un sonido de metralleta (o parecido, dentro de las limitaciones del SN76489).
Sonido
El SN76489 es un chip de sonido extremadamente sencillo de programar: un bus de 8 bits con señales /WE y /CE (que en este caso se han cortocircuitado) y una señal READY de salida. Como se puede ver en el circuito anterior, el SN76489 se alimenta a 5 voltios, mientras que el STM32 se alimenta a 3.3 voltios, lo que, a priori puede resultar un problema de cara a la señal READY. Dicho problema, sin embargo, no lo es tal ya que, según la hoja de datos del fabricante, el pin READY del SN76489 es una salida en colector abierto, por lo que puede atacar perfectamente a una entrada del STM32 siempre y cuando la resistencia de pull-up correspondiente esté a 3.3 voltios.
Como se puede ver en su hoja de datos, para enviarle un byte, es necesario hacer los siguiente pasos:
1. Esperar a que la salida READY se ponga a 1 (colector abierto), lo que indica que el chip puede recibir un comando.
2. Colocar el byte que se quiere enviar en el bus de 8 bits.
3. Poner /CE y /WE a 0.
4. Esperar a que la salida READY se ponga a 0 (a masa), lo que significa que está procesando el comando
5. Esperar a que la salida READY se ponga de nuevo a 1 (colector abierto), lo que significa que el comando ha sido procesado y el chip está preparado para recibir más comandos.
Esta secuencia hay que realizarla por cada comando (byte) que se le quiera enviar al SN76489.
A la hora de diseñar la máquina de estados se ha utilizado el formalismo de la máquina de Mealy. En este formalismo, los estados están caracterizados sólo por sus etiquetas, mientras que las transiciones están caracterizadas por el par (entrada | salida), en este caso, "entrada" será la condición de entrada para que el proceso tome por ese arco y la "salida" serán las operaciones a realizar en ese salto:
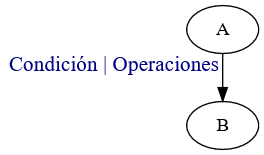
"condición" puede ser vacía, lo que significará que siempre se toma ese arco, y "operaciones" también podrá ser vacía, lo que significará que no se ejecuta ninguna operación al tomar ese arco.
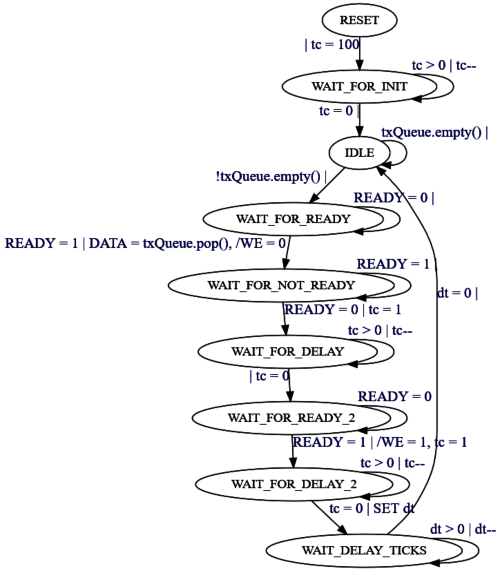
En la máquina de estados se han introducido estados adicionales al final que permiten introducir retardos entre en envío de un comando y el siguiente. Esta funcionalidad es muy útil para controlar los tiempos: tiempo de caida de los tonos de "láser", tiempo entre "balas" de la metralleta, etc. "tc" es la variable miembro "tickCounter" usada para esperas forzosas (el STM32 va más rápido que el SN76489) mientras que "dt" se corresponde con la variable miembro "delayTicks", usada para hacer las esperas entre el envío de un comando y el envío del siguiente.
Cada objeto SN76489 incluye una cola de comandos: las funciones miembro que hacen de API se encargan de preparar y meter en la cola (push) los comandos que será posteriormente enviados por la función miembro "tick" (la encargada de ejecutar la máquina de estados):
void SN76489::setToneGeneratorFrequency(uint8_t index, uint16_t frequency, int16_t sweepFrequencyIncrement, int16_t sweepTicksPerIncrement, int16_t sweepNumIncrements) { if (index > 2) // 0, 1 or 2 index = 2; frequency &= 0x03FF; // 10 bit value this->txQueue.push({(uint8_t) (0x80 | (index << 5) | (frequency & 0x0F))}); this->txQueue.push({(uint8_t) ((frequency >> 4) & 0x3F), sweepTicksPerIncrement}); while (sweepNumIncrements > 0) { frequency += sweepFrequencyIncrement; sweepNumIncrements--; this->txQueue.push({(uint8_t) ((frequency >> 4) & 0x3F), sweepTicksPerIncrement}); } } void SN76489::setToneGeneratorAttenuation(uint8_t index, uint8_t attenuation) { if (index > 2) // 0, 1 or 2 index = 2; this->txQueue.push({(uint8_t) (0x80 | (index << 5) | 0x10 | (attenuation & 0x0F))}); } void SN76489::setNoiseGeneratorFrequency(NoiseGeneratorFrequency frequency, NoiseGeneratorFeedback feedback) { this->txQueue.push({(uint8_t) (0xE0 | ((static_cast<uint8_t>(feedback) & 0x01) << 2) | (static_cast<uint8_t>(feedback) & 0x03))}); } void SN76489::setNoiseGeneratorAttenuation(uint8_t attenuation, int32_t delayTicks) { this->txQueue.push({(uint8_t) (0xF0 | (attenuation & 0x0F)), delayTicks}); }
Mientras que la función miembro "tick" deberá ser invocada desde el SYSTICK del microcontrolador (que se ejecuta varios cientos de veces por segundo). Dicha función miembro "tick" es la encargada de ejecutar la máquina de estados y de enviar los comandos al SN76489 de forma correcta.
Para separar la implementación de esta máquina de estados del hardware se define una clase abstracta "SN76489Interface", que deberá ser implementada por el "usuario" y que es la que en última instancia escribe en el bus de datos del SN76489, escribe el bit /WE y lee el bit READY del SN76489.
class SN76489Interface { public: virtual void sn76489SetByte(uint8_t v) = 0; virtual void sn76489SetWE(uint8_t v) = 0; virtual bool sn76489GetReady() = 0; };
Cuando se invoca la función miembro "init" del objeto "SN76489", se le pasa un puntero a un objeto de tipo "SN76489Interface", para que el objeto "SN76489" pueda comunicarse con un hardware real a través de este interface.
Cada elemento de la cola de comandos es un par (comando, ticksRetardo), de tal manera que la máquina de estados (la función miembro "tick") envía el comando y espera una cantidad de ticks equivalente a "ticksRetardo" antes de enviar el siguiente comando de la cola (si lo hubiese). De esta manera es muy sencillo hacer los sonidos propuestos:
- Láser: Se configura el generador de tono 0 con una frecuencia alta, se espera un par de ticks, se envía una frecuencia más baja, se espera otro par de ticks, se envía otra fecuencia más baja, etc. Esta caida de frecuencia en el tiempo genera un efecto psicoacústico "percutido", como de disparo. Al final de la secuencia se pone el volumen el mínimo del generator tono 0.
- Metralleta: Se configura el generador de ruido y se manda 17 veces la secuencia: volumen máximo con espera de 20 ticks y silencio con espera de 30 ticks. Esta alternancia de ruido/silencio repetidas veces genera el sonido de "metralleta".
Nótese que los comandos descritos para cada sonido se empujan en la cola de comandos de forma simultánea uno detrás de otro, es la máquina de estados (función miembro "tick" de la clase "SN76489") la que se encarga de enviar los comandos y realizar la espera entre comando y comando a medida que va sacando comandos de la cola.
Teclado
De forma adicional, es necesario implementar un pequeño teclado de dos botones, de manera de un botón dispare el "láser" y el otro la "metralleta". Para este menester creamos también una clase Keyboard pero en este caso, como dicha clase sí va a estar vinculada directamente con un recurso hardware (esta es una decisión arbitraria), será una clase estática (con todas sus funciones miembro estáticas).
La función miembro "init" configurará dos pines GPIO y el controlador de interrupciones externas ETXI del STM32 para que genere una interrupción cada vez que se produzca un flanco de bajada en esos dos pines del microcontrolador. Como se puede comprobar en la declaración de la clase Keyboard, la función miembro estática "interrupt" se coloca en la sección ".exti" dentro del código objeto: esto hará que el linker script la coloque en el lugar adecuado para que se invoque al producirse una interrupción de GPIO.
#ifndef __KEYBOARD_H__ #define __KEYBOARD_H__ #include <stdint.h> extern "C++" { namespace avelino { using namespace std; class KeyboardListener { public: virtual void buttonPressed(int8_t key) = 0; }; class Keyboard { protected: static KeyboardListener *listener; static int8_t currentKey; static int32_t tickCounter; enum class Status : int8_t { IDLE, WAIT_AFTER_PRESSED }; static Status status; public: static void init(KeyboardListener *listener); static void interrupt() __attribute__ ((section(".exti"))); static void tick(); }; } } #endif // __KEYBOARD_H__
La función miembro "interrupt" hace muy poco: simplemente actualiza la variable miembro "key" y limpia los "pending bits" del microcontrolador para que la interrupción pueda volver a dispararse en el futuro. Uno puede pensar que con esto ya sería, de por sí, suficiente pero lo cierto es que no es así, ya que al tratarse de entradas desde el exterior, son propensas a experimentar rebotes y ruido, por lo que se hace necesario hacer "limpieza" de esa señal mediante una sencilla máquina de estados. Es la función miembro "tick" (invocada, como su homónima de SN76489, periódicamente desde el SYSTICK del microcontrolador) la encargada de ejecutar la máquina de estados que procesa los valores de esta variable "key".
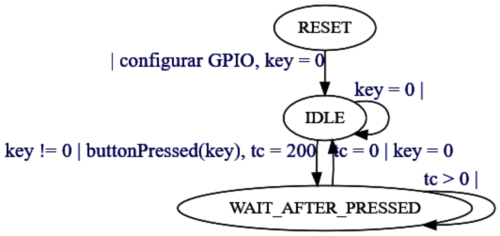
Como la interrupción se dispara sólo ante flancos de bajada, lo único que hace la máquina de estados es simplemente esperar un tiempo prudencial (200 ejecuciones de ticks) antes de volver al estado de espera a que se detecte una nueva pulsación. De esta forma se eliminan las pulsaciones espúreas que saldrían su hubiese rebote mecánico.
La función miembro "buttonPressed" de la clase "ButtonListener" (que hereda de "KeyboardListener") es invocada cada vez que se detecta la pulsación de uno de los botones y el parámetro "key" indica qué botón se ha pulsado. Es aquí donde se realizan las llamadas a la API del objeto de clase "SN76489" para encolar los comandos que generan el sonido "láser" o encolar los comandos que generan el sonido de "metralleta", en función de la tecla pulsada.
void systick() __attribute__ ((section(".systick"))); void systick() { sn76489.tick(); Keyboard::tick(); } class ButtonListener : public KeyboardListener { public: virtual void buttonPressed(int8_t key); }; void ButtonListener::buttonPressed(int8_t key) { if (key == 1) { // láser sn76489.setToneGeneratorAttenuation(0, 0); // full volume sn76489.setToneGeneratorFrequency(0, 477, 100, 5, 10); sn76489.setToneGeneratorAttenuation(0, 0x0F); // min volume } else if (key == 2) { // metralleta sn76489.setNoiseGeneratorFrequency(SN76489::NoiseGeneratorFrequency::N_512, SN76489::NoiseGeneratorFeedback::WHITE); for (int i = 0; i < 17; i++) { sn76489.setNoiseGeneratorAttenuation(0, 20); sn76489.setNoiseGeneratorAttenuation(0xFF, 30); } } }
Como se puede apreciar, la función global "systick", que es invocada de forma periódica por el timer SYSTICK del microcontrolador, es la encargada a su vez de invocar las funciones miembro "tick" de "SN76489" y "Keyboard".
El hecho de que todo el software esté basado en interrupciones permite generar un código más elegante y más eficiente desde un punto de vista energético: la función main sólo tiene que inicializar los objetos y variables y dormirse a la espera de que se produzcan interrupciones (ya sea por GPIO como de SYSTICK):
int main() { // keyboard Keyboard::init(&buttonListener); // enable systick timer SYST_RVR = 0x0001FFFF; SYST_CVR = 0; SYST_CSR = 7; // sn76489 sn76489GPIOInterface.init(); sn76489.init(&sn76489GPIOInterface); sn76489.setToneGeneratorAttenuation(0, 0xFF); // min volume for tone generator 0 sn76489.setToneGeneratorAttenuation(1, 0x0F); // min volume for tone generator 1 sn76489.setToneGeneratorAttenuation(2, 0x0F); // min volume for tone generator 2 sn76489.setNoiseGeneratorAttenuation(0x0F); // min volume for noise generator while (true) { // WFI (wait for interrupt) instruction, enters low power mode asm volatile ("wfi"); } }
Nótese el bucle infinito con la instrucción que duerme la CPU "wfi" (Wait For Interrupt).
Características de C++ aprovechadas
- Plantillas estáticas en lugar de memoria dinámica: En sistemas embebidos hay que evitar el uso de memoria dinámica y es por ello que se ha creado la plantilla "StaticQueue" que define una cola circular estática cuyos parámetros de plantilla son el tipo base y la cantidad de elementos: Esta cola estática es la utilizada para almacenar los pares (comando, ticksRetardo) que utiliza la clase SN76489.
- Enumeradores fuertemente tipados ("enum class"): Los estados en las máquinas de estado no están definidos como constantes enteras sino como tipos "enum class" que es un tipo de enumerado fuertemente tipado introducido en C++11. El uso de este tipo de datos impide, por ejemplo, que se le asigne un entero aunque su tipo base sea un entero. Además, el código generado es igual de eficiente que si se utilizasen constantes enteras y se gana mucho en claridad en el código.
A continuación puede verse un vídeo del montaje en acción (con sonido):
Todo el código fuente está disponible en la sección soft.
[ añadir comentario ] ( 3687 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 3836 )El uso de conversores analógico-digitales de tipo delta-sigma permite conseguir una conversión con una muy buena calidad usando sólo tres componentes externos y una circuitería analógica mínima. La resolución del conversor es arbitraria y depende de los recursos digitales que se tengan (biestables) y de la velocidad de reloj (sobremuestreo).
Esquema
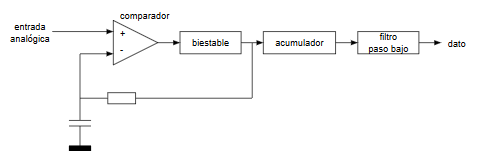
Como se puede apreciar la parte analógica del conversor se reduce a un comparador, una resistencia y un condensador. En la "zona digital" tenemos todo el meollo: un biestable, un acumulador y un filtro paso bajo. Veamos el funcionamiento con una traza sencilla.
Funcionamiento
Asumamos que empezamos con la salida que va al filtro RC a 0 y el condensador totalmente descargado y que en la entrada analógica tenemos un voltaje entre 0 y Vcc (3.3 voltios) que llamaremos $V_{in}$. En estas condiciones iniciales, como $V_{in} > 0$, el comparador emite 3.3 voltios (un 1 lógico) y por tanto, en el siguiente ciclo de reloj, el biestable carga ese 1 en su salida Q.
Tras esta primera carga la salida que va conectada al filtro RC (la Q del biestable) se pone a 1, lo que significa que el condensador empieza a cargarse a través de R. Para cuando llegue el siguiente ciclo de reloj lo más probable es que la carga del condensador aún sea muy baja y el comparador siga emitiendo a su salida un 1 (su entrada + tiene un voltaje aún mayor que su entrada -). Tendremos, por tanto que el biestable seguirá emitiendo 1s hasta que el voltaje en la entrada - del comparador sea superior a $V_{in}$, en el momento que ocurra eso la salida del comparador será de 0 voltios (un 0 lógico). El biestable en el siguiente ciclo de reloj cargará ese 0 en su Q y el condensador empezará ahora a descargarse a través de la R.
Como se puede apreciar, el sistema en lazo cerrado lo que hace es, mediante 0s y 1s tratar de hacer que el voltaje en la entrada - del comparador (el voltaje en el condensador) "siga" al voltaje de entrada $V_{in}$ y esto, en la práctica, significa que a la salida del biestable lo que tenemos es una especie de señal PWM cuyo ciclo de trabajo será proporcional al voltaje $V_{in}$:
1.- Cuanto mayor es el valor de $V_{in}$, mayor cantidad de 1s emite el biestable para tratar de "alcanzar" $V_{in}$.
2.- Cuanto menor es el valor de $V_{in}$, mayor es la cantidad de 0s que emite el biestable para tratar de "alcanzar" $V_{in}$.
3.- Se puede ver, además, que para un valor próximo a ${Vcc \over 2}$ el biestable emitirá aproximadamente la misma cantidad de 0s que de 1s por unidad de tiempo.
Ahora supongamos que pasamos la salida del biestable por un circuito combinacional que ante un 0 en la entrada emite un -1 en un bus de N bits y ante un 1 en la entrada emite un +1 en esa misma salida de N bits. Si durante $2^{N-1}$ ciclos de reloj vamos sumando en un acumulador con signo los valores +1 y -1 que van saliendo de este circuito combinacional tendremos lo siguiente:
1.- Para valores altos de $V_{in}$, que generan muchos más 1s que 0s en la salida del biestable, tendremos que el acumulador cada $2^{N-1}$ ciclos de reloj tendrá un valor próximo a $2^{N-1}$.
2.- Para valores bajos de $V_{in}$, que generan muchos más 0s que 1s en la salida del biestable, tendremos que el acumulador, cada $2^{N-1}$ ciclos de reloj, tendrá un valor próximo a $-2^{N-1}$.
3.- Para valores próximos a ${Vcc \over 2}$, que generan una cantidad muy similar de 0s y de 1s por unidad de tiempo, tendremos que el acumulador, cada $2^{N-1}$ ciclos de reloj, tendrá un valor próximo a 0.
Si cada $2^{N-1}$ ciclos de reloj cargamos el valor de este acumulador sobre un registro (que podemos llamar de salida), justo antes de poner de nuevo el acumulador a 0 (y volver a acumular los +1 y -1 que llegan del biestable), tenemos que este registro de salida será el resultado de la conversión analógico-digital del voltaje de entrada $V_{in}$ en N bits, que era nuestro objetivo. En la implementación recomendada se introduce una tercera etapa que realiza un sobremuestreo adicional para suavizar la señal (actúa como filtro paso bajo) pero que no se ha implementado en este caso por simplicidad.
Otra característica importante en este tipo de conversores es que la resolución en bits del conversor viene determinada por N (la anchura en bits del acumulador y del filtro paso bajo), que es un parámetro relativamente sencillo de cambiar, y que no requiere cambios en la electrónica externa.
Implementación
A continuación puede verse un esquema detallado de lo que sería la implementación en una FPGA o en un CPLD del conversor descrito:
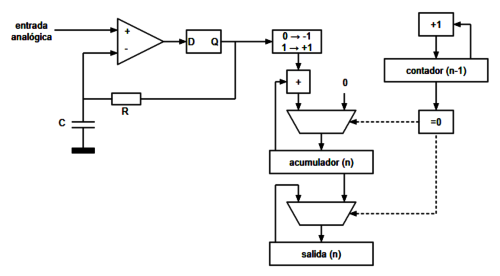
Cada vez que el contador pasa por 0 hace que en acumulador se cargue en el registro de salida y al mismo tiempo se reinicie con el valor 0. Los valores de la resistencia R y del condensador C deben ser elegidos acorde a la frecuencia de reloj del sistema. Por ejemplo, Lattice Semiconductor recomienda que la constante de tiempo del filtro $t = R \times C$ cumpla que $200 < t \times f_{clk} < 1000$. En este caso concreto se ha hecho una implementación sobre un CPLD de Altera (Intel) que va a 50 MHz y se han elegido los valores de C = 1.5 nF y R = 10 K, que cumplen dicha desigualdad.
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity DeltaSigmaADC is port ( Reset : in std_logic; Clk : in std_logic; DataOut : out std_logic_vector(7 downto 0); ComparatorIn : in std_logic; RCChargeOut : out std_logic ); end entity; architecture Architecture1 of DeltaSigmaADC is signal DBus : std_logic; signal QBus : std_logic; signal FollowerOut : std_logic_vector(15 downto 0); signal CounterDBus : std_logic_vector(14 downto 0); signal CounterQBus : std_logic_vector(14 downto 0); signal IntegratorDBus : std_logic_vector(15 downto 0); signal IntegratorQBus : std_logic_vector(15 downto 0); signal LatchDBus : std_logic_vector(15 downto 0); signal LatchQBus : std_logic_vector(15 downto 0); begin -- biestable de seguimiento de voltaje process (Clk) begin if (Clk'event and (Clk = '1')) then QBus <= DBus; end if; end process; DBus <= ComparatorIn; RCChargeOut <= QBus; FollowerOut <= std_logic_vector(to_signed(-1, 16)) when (QBus = '0') else std_logic_vector(to_signed(1, 16)); -- contador process (Clk) begin if (Clk'event and (Clk = '1')) then CounterQBus <= CounterDBus; end if; end process; CounterDBus <= std_logic_vector(to_signed(0, 15)) when (Reset = '1') else std_logic_vector(signed(CounterQBus) + 1); -- integrador process (Clk) begin if (Clk'event and (Clk = '1')) then IntegratorQBus <= IntegratorDBus; end if; end process; IntegratorDBus <= std_logic_vector(to_signed(0, 16)) when (signed(CounterQBus) = 0) else std_logic_vector(signed(FollowerOut) + signed(IntegratorQBus)); -- latch process (Clk) begin if (Clk'event and (Clk = '1')) then LatchQBus <= LatchDBus; end if; end process; LatchDBus <= IntegratorQBus when (signed(CounterQBus) = 0) else LatchQBus; -- salida DataOut <= LatchQBus(15 downto 8); end architecture;
El código fuente está disponible en la sección soft.
[ añadir comentario ] ( 2959 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 6163 )La aritmética de punto fijo es un mecanismo muy útil para la implementación de funciones matemáticas en procesadores sin unidad de coma flotante como microcontroladores y procesadores pequeños de 8 o 16 bits. A lo largo de este post se plantea el uso de la sobrecarga de operadores de C++ para facilitar las tareas de programación y mejorar la legibilidad del código cuando se usan tipos de punto fijo.
Introducción
La aritmética de punto fijo permite realizar operaciones con números fraccionarios mediante tipos enteros y operaciones enteras. En anteriores posts de este blog se ha hablado de forma extensa acerca de este tema, por lo que se remite a ellos a la persona interesada. A lo largo de este post usaré siempre valores de punto fijo Q16.16 (32 bits con 16 bits para la parte entera y 16 bits para la parte fraccionaria).
Implementación tradicional mediante macros
Tradicionalmente siempre he implementado la aritmética de punto fijo con un fichero de cabecera en el que defino "fixedpoint_t" como un "int32_t" y unas macros especiales para las operaciones de conversión de entero a punto fijo, de multiplicación y de división (las más "complejas"):
typedef int32_t fixedpoint_ct; #define FP_MUL(x, y) ((int32_t) ((((int64_t) (x)) * ((int64_t) (y))) >> 16)) #define FP_DIV(x, y) ((int32_t) ((((int64_t) (x)) << 16) / ((int64_t) (y)))) #define TO_FP(x) (((int32_t ) (x)) << 16)
Como se puede apreciar, se trata de una implementación extremadamente sencilla y si lo que queremos es escribir una función que calcule:
$$\left({a \times b}\right) + \left({a \over b}\right)$$
Introduciríamos el siguiente código:
fixedpoint_ct fWithMacros(fixedpoint_ct a, fixedpoint_ct b) { return FP_MUL(a, b) + FP_DIV(a, b); }
Y para los valores $a = 4$ y $b = 3$ la invocaríamos de la siguiente forma:
fixedpoint_ct v = fWithMacros(TO_FP(4), TO_FP(3));
Se trata de una implementación perfectamente válida aunque adolece de falta de claridad en el código: hay que leer con cuidado las operaciones aritméticas para no confundirse. Por otro lado es una implementación que tiene la ventaja de que en todo momento está claro que no estamos trabajando con un tipo "trivial".
Implementación basada en sobrecarga de operadores
Buscando un código más legible que el anterior, lo lógico es recurrir a la sobrecarga de operadores de C++. Definimos una clase "fixedpoint_t" en la que metemos un entero de 32 bits y definimos las cuatro operaciones básicas como "operator" dentro de la propia clase:
class fixedpoint_t { public: int32_t v; fixedpoint_t(int32_t x = 0) : v(x << 16) { }; inline fixedpoint_t &operator = (const int32_t &x) { this->v = x << 16; return *this; }; inline fixedpoint_t operator + (const fixedpoint_t &x) { fixedpoint_t ret; ret.v = this->v + x.v; return ret; }; inline fixedpoint_t operator - (const fixedpoint_t &x) { fixedpoint_t ret; ret.v = this->v - x.v; return ret; }; inline fixedpoint_t operator * (const fixedpoint_t &x) { fixedpoint_t ret; ret.v = (((int64_t) this->v) * ((int64_t) x.v)) >> 16; return ret; }; inline fixedpoint_t operator / (const fixedpoint_t &x) { fixedpoint_t ret; ret.v = (((int64_t) this->v) << 16) / ((int64_t) x.v); return ret; }; };
Esta implementación nos permite ahora escribir la misma función de antes de una forma más legible:
fixedpoint_t fWithOperators(fixedpoint_t a, fixedpoint_t b) { return (a * b) + (a / b); }
Y, de la misma manera, también nos permite invocarla de forma más legible:
fixedpoint_t v = fWithOperators(4, 3);
Sin embargo se podría pensar que una implementación así generaría mucho más código que la implementación basada en macros. Hagamos unas pruebas.
Comparativa
Si compilamos con gcc el código de ambas funciones sin opciones de optimización:
g++ -std=c++11 -o fp fp.cc
la diferencia es abismal:
_Z11fWithMacrosii:
push %rbp
mov %rsp,%rbp
push %rbx
mov %edi,-0xc(%rbp)
mov %esi,-0x10(%rbp)
mov -0xc(%rbp),%eax
movslq %eax,%rdx
mov -0x10(%rbp),%eax
cltq
imul %rdx,%rax
sar $0x10,%rax
mov %eax,%ecx
mov -0xc(%rbp),%eax
cltq
shl $0x10,%rax
mov -0x10(%rbp),%edx
movslq %edx,%rbx
cqto
idiv %rbx
add %ecx,%eax
pop %rbx
pop %rbp
retq
_Z14fWithOperators12fixedpoint_tS_:
push %rbp
mov %rsp,%rbp
sub $0x40,%rsp
mov %edi,-0x30(%rbp)
mov %esi,-0x40(%rbp)
lea -0x40(%rbp),%rdx
lea -0x30(%rbp),%rax
mov %rdx,%rsi
mov %rax,%rdi
callq 4009cc <_ZN12fixedpoint_tdvERKS_>
mov %eax,-0x20(%rbp)
lea -0x40(%rbp),%rdx
lea -0x30(%rbp),%rax
mov %rdx,%rsi
mov %rax,%rdi
callq 40098a <_ZN12fixedpoint_tmlERKS_>
mov %eax,-0x10(%rbp)
lea -0x20(%rbp),%rdx
lea -0x10(%rbp),%rax
mov %rdx,%rsi
mov %rax,%rdi
callq 400952 <_ZN12fixedpoint_tplERKS_>
leaveq
retq
El compilador ha hecho caso omiso del "inline" de las funciones miembro de la clase "fixedpoint_t" y las ha implementado como funciones aparte en ensamblador. En este caso la implementación usando macros es más eficiente. Activemos ahora el primer nivel de optimización "-O1":
g++ -std=c++11 -O1 -o fp fp.cc
Voilà, ahora apenas notamos la diferencia en el código generado:
_Z11fWithMacrosii:
movslq %edi,%rax
movslq %esi,%rsi
mov %rax,%rcx
imul %rsi,%rcx
sar $0x10,%rcx
shl $0x10,%rax
cqto
idiv %rsi
add %ecx,%eax
retq
_Z14fWithOperators12fixedpoint_tS_:
movslq %edi,%rdi
movslq %esi,%rsi
mov %rdi,%rax
shl $0x10,%rax
cqto
idiv %rsi
imul %rdi,%rsi
sar $0x10,%rsi
add %esi,%eax
retq
La implementación utilizando la clase "fixedpoint_t" con los operadores sobrecargados genera un código igual de eficiente que la implementación basada en macros.
Como conclusión podemos sacar que no es necesario sacrificar legibilidad en aras de la velocidad de ejecución, siempre y cuando usemos correctamente los elementos del lenguaje y compilemos usando las opciones de optimización adecuadas.
El código fuente puede descargarse de la sección soft.
[ añadir comentario ] ( 4634 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 13441 )A la hora de controlador un display LCD mediante el conocido adaptador I2C la gran mayoría de ejemplos disponibles por ahí implementan los estados de espera necesarios mediante retardos explícitos ("delays"). Dichas implementaciones están bien como prueba de concepto, pero no son deseables en entornos multitarea donde no podemos desperdiciar ciclos sólo esperando. En entornos reales se precisa de implementaciones no bloqueantes que hagan uso de timers e interrupciones.
El circuito
La interfaz de un display LCD estándar de caracteres es una interfaz paralelo de 8 bits, con 3 líneas de control adicionales (RS, EN y RW). Del bus paralelo de 8 bits pueden usarse sólo los 4 bits más significativos enviando de forma adecuada los comandos. Los circuitos de conversión a I2C que se venden habitualmente por AliExpress, Ebay y demás están basados en el conversor I2C/paralelo de 8 bits PCF8574 de Texas Instruments: del bus paralelo de dicho conversor se sacan los 4 bits más significativos para el bus paralelo del LCD y las tres señales de control para RS, EN y RW.
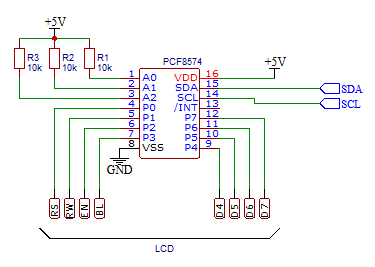
La configuración habitual en este tipo de módulos es esta:
| PCF8574 | bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
| LCD | D7 | D6 | D5 | D4 | BL | EN | RW | RS |
En la tabla se puede apreciar una cuarta señal de control etiquetada como BL (backlight) que controla el encendido del led de la luz trasera. Dicho led no forma parte de la circuitería estándar del display y ha sido introducido en versiones más recientes.
El problema
Los displays baratos de caracteres LCD que se encuentran en el mercado están basados en en un chip de Hitachi que no se caracteriza precisamente por su velocidad (probablemente debe ser uno de los chips más rentabilizados de toda la historia de Hitachi) y normalmente cada acceso debe estar seguido por una espera de uno a varios microsegundos, dependiendo del acceso realizado. A continuación puede verse la tabla de comandos de referencia del display, nótese la columna de la derecha ("Execution Time"):
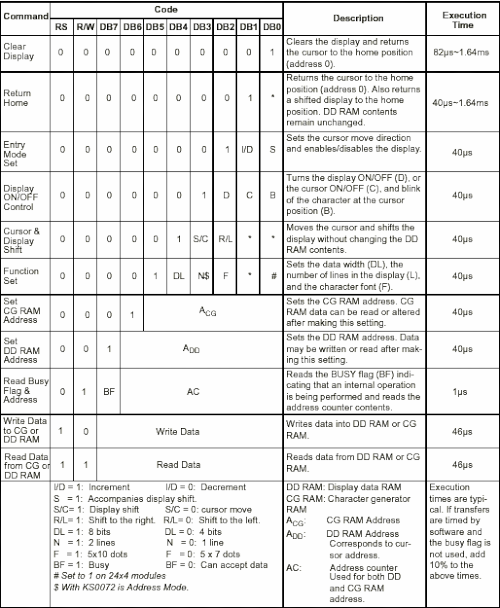
(imagen extraida de https://learningmsp430.wordpress.com/2013/11/13/16x2-lcd-interfacing-in-8bit-mode/)
Cuando uno realiza una búsqueda en internet sobre códigos de ejemplo para control de displays LCD, la gran mayoría de los mismos (no digo todos porque considero que no los he visto todos, pero al menos todos los que yo he visto), implementan las esperas mediante retardos utilizando funciones "delay" o similares. Esta forma de implementación, aunque resulta simple, supone un desperdicio de ciclos e impide que el microcontrolador realice otras tareas de forma concurrente.
La solución no bloqueante
La solución ideal pasaría por una implementación basada en colas y en interrupciones. En este caso se ha implementado una máquina de estados que controla el flujo de datos I2C, el troceado de los bytes en dos nibbles y las esperas que hay que realizar entre un envío y el siguiente. Grosso modo, la solución sería la siguiente:
- Cada vez que se quiere escribir en el display, lo que se hace es escribir lo que se quiere mandar al display en una cola de datos, por lo que la función encargada de escribir regresa inmediatamente (no es bloqueante).
- El systick del microcontrolador cuando detecta que hay algún dato en la cola de datos inicia una máquina de estados que se encarga de trocear en byte en dos nibbles y enviarlos en tiempos diferentes, así hasta que la cola de datos quede vacía, en cuyo momento la máquina de estados pasa a modo "IDLE" y queda a la espera que de haya más datos en la cola.
- La capa I2C también está implementada como una cola de bytes de tal manera que si la capa LCD quiere escribir N bytes seguidos por I2C, los escribe de forma no bloqueante en la cola I2C (la función de escritura I2C también regresa inmediatamente) y se va vaciando a medida que la interrupción de callback de transmisión es llamada por el microcontrolador.
A continuación puede verse cómo ha quedado la máquina de estados del controlador LCD:
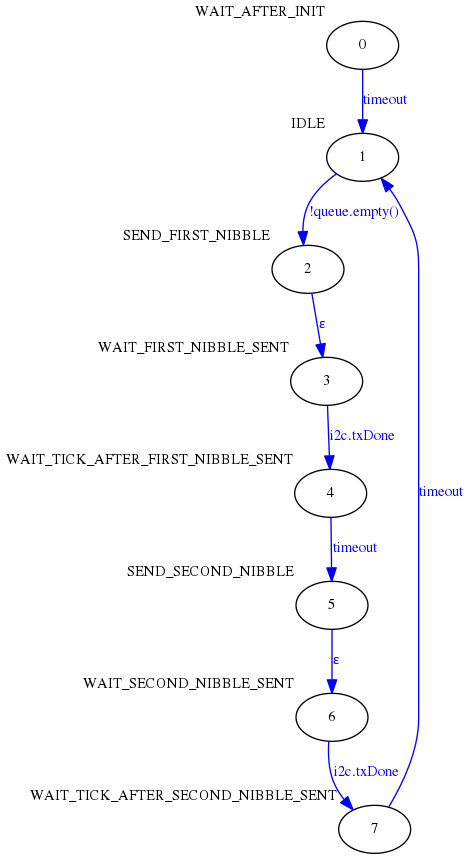
El código no queda tan sencillo a simple vista pero se trata, sin duda, de una implementación más eficiente.
#include "LCD.H" using namespace avelino; using namespace std; void LCD::init(uint8_t address) { this->address = address; this->timerCounter = 5; this->status = LCD::Status::WAIT_AFTER_INIT; this->queue.push(LCD::QueueItem(0x33, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x32, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x28, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x08, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x01, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x06, LCD::IsCommand::YES)); this->queue.push(LCD::QueueItem(0x0C, LCD::IsCommand::YES)); } void LCD::tick() { Status localStatus = this->status; do { this->status = localStatus; if (localStatus == LCD::Status::WAIT_AFTER_INIT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::IDLE; } else if (localStatus == LCD::Status::IDLE) { if (!this->queue.empty()) { I2CManager::deviceAddress = this->address << 1; localStatus = LCD::Status::SEND_FIRST_NIBBLE; } } else if (localStatus == LCD::Status::SEND_FIRST_NIBBLE) { uint8_t byte = this->queue.head().byte; LCD::IsCommand isCommand = this->queue.head().isCommand; I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_1 | LCD::BL_1); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_0 | LCD::BL_1); I2CManager::send(); localStatus = LCD::Status::WAIT_FIRST_NIBBLE_SENT; } else if (localStatus == LCD::Status::WAIT_FIRST_NIBBLE_SENT) { if (I2CManager::txDone) { this->timerCounter = 1; localStatus = LCD::Status::WAIT_TICK_AFTER_FIRST_NIBBLE_SENT; } } else if (localStatus == LCD::Status::WAIT_TICK_AFTER_FIRST_NIBBLE_SENT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::SEND_SECOND_NIBBLE; } else if (localStatus == LCD::Status::SEND_SECOND_NIBBLE) { uint8_t byte = this->queue.head().byte << 4; LCD::IsCommand isCommand = this->queue.head().isCommand; this->queue.pop(); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_1 | LCD::BL_1); I2CManager::txQueue.push((byte & 0xF0) | ((isCommand == LCD::IsCommand::YES) ? LCD::RS_0 : LCD::RS_1) | LCD::RW_0 | LCD::EN_0 | LCD::BL_1); I2CManager::send(); localStatus = LCD::Status::WAIT_SECOND_NIBBLE_SENT; } else if (localStatus == LCD::Status::WAIT_SECOND_NIBBLE_SENT) { if (I2CManager::txDone) { this->timerCounter = 1; localStatus = LCD::Status::WAIT_TICK_AFTER_SECOND_NIBBLE_SENT; } } else if (localStatus == LCD::Status::WAIT_TICK_AFTER_SECOND_NIBBLE_SENT) { if (this->timerCounter > 0) this->timerCounter--; else localStatus = LCD::Status::IDLE; } } while (localStatus != this->status); } void LCD::write(const char *s, int16_t size, LCD::IsCommand isCommand) { while ((*s != 0) && ((size < 0) || (size > 0))) { this->queue.push(QueueItem(*s, isCommand)); s++; if (size > 0) size--; } }
La función miembro "tick" es invocada desde la interrupción systick del microcontrolador en "main.cc":
LCD lcd; void systick() __attribute__ ((section(".systick"))); void systick() { lcd.tick(); }
Nótese que las colas (tanto la cola I2C como la cola LCD) están implementadas usando colas circulares estáticas a través de una plantilla ("StaticQueue.H").
#ifndef __STATICQUEUE_H__ #define __STATICQUEUE_H__ #include <stdint.h> extern "C++" { namespace avelino { using namespace std; template <typename T, int32_t N> class StaticQueue { public: T data[N]; int32_t headIndex; int32_t tailIndex; void push(const T &v); const T &head() { return this->data[this->headIndex]; }; void pop(); bool empty() { return (this->headIndex == this->tailIndex); }; StaticQueue() : headIndex(0), tailIndex(0) { }; }; template <typename T, int32_t N> void StaticQueue<T, N>::push(const T &v) { this->data[this->tailIndex] = v; this->tailIndex++; if (this->tailIndex == N) this->tailIndex = 0; } template <typename T, int32_t N> void StaticQueue<T, N>::pop() { this->headIndex++; if (this->headIndex == N) this->headIndex = 0; } } } #endif // __STATICQUEUE_H__
Se ha utilizado en varios sitios el "enum class", que permite trabajar con enumerados fuertemente tipados (introducido en el estándar C++11).
En la sección soft puede descargarse todo el código fuente.
[ añadir comentario ] ( 3087 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |
( 3 / 13702 ) Calendario
Calendario




