
El algoritmo de Goertzel permite calcular un coeficiente aislado de la DFT sobre un conjunto de N muestras con una complejidad temporal de O(n) y una complejidad espacial de O(1), además N no tiene por qué ser potencia de 2. Este algoritmo se basa en la aplicación de una ecuación en diferencias finitas (un filtro IIR).
A mayor N, mayor resolución en frecuencia y también mayor latencia en la detección de los tonos. Es necesario, por tanto encontrar un compromiso. La resolución en hercios del algoritmo de Goertzel viene dada por:
$$R = {f_s \over N}$$
Siendo $f_s$ la frecuencia de muestreo y $N$ el número de muestras que se evalúan en cada pasada.
1. Se calcula el índice del coeficiente correspondiente
Lo primero que hay que hacer es calcular el índice del coeficiente asociado a la DFT a partir de la frecuencia que queremos detectar:
$$k = N{f \over f_s}$$
Siendo $f$ la frecuencia que queremos detectar, $f_s$ la frecuencia de muestreo y $N$ el número de muestras que procesamos cada vez. La máxima frecuencia que podemos detectar será la mitad de la frecuencia de muestreo.
2. Para cada conjunto de N muestras
2.1. Se aplica la ecuación en diferencias
Para cada una de las muestras que van llegando, vamos aplicando la siguiente ecuación en diferencias finitas:
$$s[n] = x[n] + 2\cos\left({2 \pi k \over N}\right)s[n-1] - s[n-2]$$
$$n = 0..N$$
Con codiciones iniciales $s[-1] = s[-2] = 0$. Se trata, como se puede ver, de un sencillo filtro IIR de segundo orden.
2.2. Se obtiene del coeficiente k-esimo de la DFT
Se puede demostrar que el coeficiente k-ésimo de la DFT de tamaño N es:
$$X(k) = s[N] - W_N^ks[N-1]$$
Siendo:
$$W_N = e^{-j\left({2 \pi \over N}\right)}$$
Por tanto:
$$X(k) = s[N] - e^{-j\left({2 \pi \over N}\right)k}s[N-1]$$
Si desarrollamos la exponencial compleja mediante la fórmula de Euler tenemos que:
$$e^{-j\left({2 \pi \over N}\right)k} = \cos\left({2 \pi \over N}\right) - j \sin\left({2 \pi k \over N}\right)$$
Y, por tanto:
$$X(k)_{real} = s[N] - \cos\left({2 \pi k \over N}\right)s[N-1]$$
$$X(k)_{imag} = \sin\left({2 \pi k \over N}\right)s[N-1]$$
Para calcular la magnitud de la banda de frecuencia correspondiente calculamos el módulo de $X(k)$:
$$M^2 = \left|X(k)\right|^2 = X(k)_{real}^2 + X(k)_{imag}^2$$
De esta forma podemos medir la magnitud de la banda de frecuencia correspondiente al coeficiente k-ésimo de la DFT o, lo que es lo mismo, la magnitud de la banda de frecuencia correspondiente a la frecuencia $f$.
$$k = N{f \over f_s} \Rightarrow f = {k f_s \over N}$$
Implementación
A continuación se puede ver una implementación del algoritmo de Goertzel en Arduino:
const int ANALOG_INPUT = A0; const int SAMPLE_RATE_HZ = 3000; const int SAMPLE_PERIOD_US = 1000000 / SAMPLE_RATE_HZ; const int F_HZ = 440; const int N = 3000; const int K = 440; // N * F_HZ / SAMPLE_RATE_HZ; unsigned long tPrev; struct goertzelFilter { float s1, s2; int k, n; float sinv, cosv, cosv2; int nextIteration; }; struct goertzelFilter filter; void goertzelFilterReset(struct goertzelFilter &f) { f.s1 = 0; f.s2 = 0; f.nextIteration = 0; } void goertzelFilterInit(struct goertzelFilter &f, int k, int n) { f.k = k; f.n = n; f.cosv = cos(2 * PI * k / n); f.sinv = sin(2 * PI * k / n); f.cosv2 = 2 * f.cosv; goertzelFilterReset(f); } boolean goertzelFilterFinished(struct goertzelFilter &f) { return (f.nextIteration == (f.n + 1)); } void goertzelFilterRun(struct goertzelFilter &f, float input) { float s = input + (f.cosv2 * f.s1) - f.s2; f.s2 = f.s1; f.s1 = s; f.nextIteration++; } float goertzelFilterGetMagnitude(struct goertzelFilter &f) { float real = f.s1 - (f.cosv * f.s2); float imag = f.sinv * f.s2; return ((real * real) + (imag * imag)); } void setup() { Serial.begin(9600); tPrev = micros(); goertzelFilterInit(filter, K, N); goertzelFilterReset(filter); } void loop() { unsigned long t = micros(); if ((t - tPrev) >= SAMPLE_PERIOD_US) { int v = analogRead(ANALOG_INPUT); if (goertzelFilterFinished(filter)) { float magnitude = goertzelFilterGetMagnitude(filter); Serial.println(magnitude); goertzelFilterReset(filter); } else goertzelFilterRun(filter, ((float) v - 512) / 512); tPrev = t; } }
Se ha elegido una frecuencia de muestreo baja (3000Hz) para poder trabajar cómodamente con tipos float. Utilizando aritmética de punto fijo podríamos incremenentar la frecuencia de muestreo y que la detección sea más precisa.
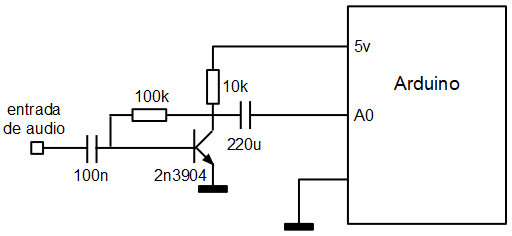
La entrada de audio se toma de la entrada analógica A0 a la que se conecta un sencillo circuito amplificador:
Elegir el valor de N
A la hora de elegir la N lo ideal es escogerla lo más grande posible, que nos permita una latencia razonable y que se cumpla que:
$$k = N{f \over f_s} \in \mathbb{N}$$
Por ejemplo, para detectar un tono de 1Khz sobre una señal muestreada a 6KHz lo ideal sería que la N valiese: 96, 102, 114 Ya que para todos estos valores se cumple que $k$ es número natural.
Magnitudes medidas para diferentes tonos
En ausencia de señal de entrada: 0.30, 0.37, 0.30, 0.35, 0.44, 0.32, 0.37, 0.28...
Con una señal de entrada de 200Hz: 2.56, 1.73, 3.56, 0.81, 0.58, 1.67, 4.71, 6.81...
Con una señal de entrada de 440Hz (la frecuencia del detector): 138.41, 87.29, 441.14, 185.20, 233.03, 762.27, 80.62, 330.98...
Con una señal de entrada de 500Hz: 25.70, 9.60, 22.50, 2.76, 16.62, 18.75, 23.56, 35.58...
[ añadir comentario ] ( 3994 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |

 ( 3 / 5922 )
( 3 / 5922 ) Calendario
Calendario




