
El algoritmo se basa en la técnica de divide y vencerás. Partiendo de una ruta inicial formada por un conjunto de N puntos, $p_0$ a $p_{n - 1}$ buscamos, de entre los puntos intermedios, el que esté más alejado de la recta que une $p_0$ y $p_{n - 1}$. Sea este punto $p_i$ y $d(i, 0, n - 1)$ la distancia entre $p_i$ y la recta que une $p_0$ con $p_{n - 1}$.
Si $d(i, 0, n - 1)$ supera un valor umbral que llamaremos $\varepsilon$, realizamos dos llamadas recursivas, una que ejecuta el algoritmo entre los puntos $p_0$ y $p_i$ y otra que ejecuta el algoritmo entre los puntos $p_i$ y $p_{n - 1}$.
Si $d(i, 0, n - 1)$ no supera el valor umbral de $\varepsilon$, descartamos de la ruta final todos los puntos intermedios entre $p_0$ y $p_{n - 1}$, esto es, descartamos todos los puntos $p_j$ tales que $i < j < n - 1$.
Con un ejemplo se ve mejor. Consideremos la siguiente ruta formada por 5 puntos, de $p_0$ a $p_4$ y consideremos un valor de $\varepsilon = 1.3$.
|
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
Inicialmente consideramos la recta que une $p_0$ con $p_4$ (el primero con el último) y buscamos el punto más alejado de ella. En nuestro caso es $p_3$ (lo he subrayado) y la distancia de la recta $\overline{p_0p_4}$ a $p_3$ es de 3.82 aproximadamente, dicho valor es superior a nuestro $\varepsilon$ (1.3) y, por tanto dividimos el problema en dos subproblemas de forma recursiva.
Invocamos, por un lado el algoritmo considerando la ruta formada por los puntos $p_0$ a $p_3$ y, por otro lado el mismo algoritmo considerando la ruta formada por los puntos $p_3$ a $p_4$. Este último caso es trivial ya que no hay puntos intermedios y, obviamente, no se puede descartar ningún punto entre $p_3$ y $p_4$.
Si consideramos ahora la ruta formada por los puntos $p_0$ a $p_3$.
|
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
Hacemos el mismo razonamiento: consideramos la recta que une el primer punto con el último ($p_0$ con $p_3$) y buscamos el punto intermedio más alejado de dicha recta. En este caso el punto más alejado de la recta que une $p_0$ con $p_3$ es $p_1$ (de nuevo subrayado) con una distancia aproximada de 1.34.
Como 1.34 es mayor que nuestro $\varepsilon$, volvemos a subdividir el problema en dos nuevos problemas más pequeños. Por un lado llamamos al algoritmo con la ruta formada por los puntos $p_0$ y $p_1$ y por otro lado llamamos al algoritmo con la ruta formada por los puntos $p_1$ a $p_3$. El cálculo del algoritmo para dos puntos, al igual que pasó anteriormente con $p_3$ y $p_4$ es trivial ya que, al no haber puntos intermedios, no es posible descartar ningún punto. Por tanto nos centraremos en el caso de la ruta entre $p_1$ y $p_3$.
|
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
| 3
| 1 2
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
Recordemos que, hasta ahora, no se ha descartado ningún punto para la ruta final. Para la ruta formada por los puntos $p_1$ a $p_3$, el punto más alejado de la recta entre $p_1$ y $p_3$ es $p_2$ con una distancia de aproximadamente 0.39. Dicha distancia sí que es menor que nuestro umbral $\varepsilon$, por tanto descartamos todos los puntos intermedios entre $p_1$ y $p_3$.
|
| 3
| 1
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
| 3
| 1
|
| 0
| 4
+-+-+-+-+-+-+-+-+-+
Como se puede ver, el algoritmo finalmente ha descartado el punto $p_2$ de la ruta.
A continuación se puede ver cómo sería el pseudocódigo:
ramer_douglas_peucker(vector, epsilon, izquierda, derecha)
indice := 0
max := 0
para j := (izquierda + 1) hasta (derecha - 1) hacer
d := distancia del punto vector[j] a la recta (vector[izquierda], vector[derecha])
si (d > max) entonces
max := d
indice := j
fin si
fin para
si (max > epsilon) entonces
ramer_douglas_peucker(vector, epsilon, izquierda, indice)
ramer_douglas_peucker(vector, epsilon, indice, derecha)
en otro caso
para j := (izquierda + 1) hasta (derecha - 1) hacer
marcar vector[j] como descartado de la ruta final
fin para
fin si
Y un ejemplo de implementación en C++ utilizando plantillas:
#include <vector> extern "C++" { namespace avelino { using namespace std; class RamerDouglasPeuckerPoint { public: virtual double getRamerDouglasPeuckerDistance(RamerDouglasPeuckerPoint &p1, RamerDouglasPeuckerPoint &p2) = 0; virtual void markAsDiscarded() = 0; }; template <class T> void ramerDouglasPeuckerSimplify(vector<T> &v, double epsilon, int left, int right) { // find the point with the max distance int index = 0; double maxDistance = 0; for (int j = left + 1; j <= (right - 1); j++) { RamerDouglasPeuckerPoint *p = &v[j]; double d = p->getRamerDouglasPeuckerDistance(v[left], v[right]); if (d > maxDistance) { index = j; maxDistance = d; } } if (maxDistance > epsilon) { // recursive calls ramerDouglasPeuckerSimplify(v, epsilon, left, index); ramerDouglasPeuckerSimplify(v, epsilon, index, right); } else { // discard all but first and last point for (int j = left + 1; j <= (right - 1); j++) v[j].markAsDiscarded(); } } } }
Para utilizar la función template hay que crear una clase que herede de
RamerDouglasPeuckerPoint y que implemente, al menos, los dos métodos virtuales puros. Para puntos en el plano 2D podríamos hacer una clase de este estilo:#include "RamerDouglasPeucker.H" extern "C++" { namespace avelino { using namespace std; class MapPoint : public RamerDouglasPeuckerPoint { protected: double x; double y; bool discarded; public: MapPoint(double x, double y); double getRamerDouglasPeuckerDistance(RamerDouglasPeuckerPoint &p1, RamerDouglasPeuckerPoint &p2); void markAsDiscarded(); double getX(); double getY(); bool isDiscarded(); }; } }
Esta clase implementaría el método
getRamerDouglasPeuckerDistance, que devuelve la distancia entre el punto y la recta formada por los dos puntos pasados por parámetros, y el método markAsDiscarded que permite marcar puntos como descartados. Utilizando esta clase, invocar el algoritmo es tan sencillo como hacer:... vector<MapPoint> v; ramerDouglasPeuckerSimplify<MapPoint>(v, 1.3, 0, v.size() - 1); ...
A continuación puede verse el resultado de la ejecución del algoritmo sobre un perfil del continente africano formado por 28653 puntos, al que se le aplica el algoritmo con $\varepsilon = 4.5$.
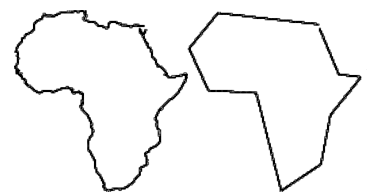
(imagen extraida de http://www.scielo.br/scielo.php?pid=S0104-65002004000100006&script=sci_arttext con licencia Creative Commons Attribution License. Sociedade Brasileira de Computação)
Código fuente en la sección soft.
[ 2 comentarios ] ( 5666 visualizaciones ) | [ 0 trackbacks ] | enlace permanente |


 ( 3 / 4153 )
( 3 / 4153 ) Calendario
Calendario




